

自動車には主として3タイプのセンサ(カメラ、レーダー、LIDAR)が搭載されており、それぞれ役割が異なっています。各センサの役割について、また先進運転支援システム(ADAS)および自動運転のセンシング・ニーズを各センサがどのように解決できるかについては、業界内で今も混乱があるようです。
筆者は友人マットと興味深い会話をしました。彼は、私がADASシステムや自動運転車で使用されるTIのミリ波(mmWave)センサの仕事をしていることを知っているため、さまざまな運転状況において自動運転車がどのような性能を見せたかという記事を読むと必ず私にちょっかいを出してきます。今回は、障害物の検出性能が話題になりました。彼との会話の一部を紹介します。
マット:「その車がLIDARを搭載していたら、車線の真ん中にあった物体を簡単に検出できたと思うんだが」
筆者:「僕はそう思わないよ」
マット:「えっ、どうして。その車にはカメラ・センサとレーダー・センサが搭載されていたにもかかわらず、ADASシステムは車線の真ん中にあった車を見つけられなかったんだ」
筆者:「こういった事例に関する最近の記事を読めば気付くはずだが、カメラは、グレアなどの影響を受けて路上の物体を見逃すことが多いんだ。またカメラは、高コントラストや、雨、霧、雪といった視界不良の状況に弱い。今回のケースでは、レーダー・センサが対象物を特定したはずだ」
マット:「にもかかわらず、ADASシステムは物体を検出できなかった。ADASシステムにしても自動運転システムにしても検出が難しかったと思える事例は他にもいろいろと目にしている。何が問題なんだろうか」
筆者:「ADASの意思決定システムは、対象物が本当にそこにあるのか否か(疑似アラームか否か)を判定する際、レーダーではなく、カメラをプライマリ・センサとしていることに問題があると思う」
マット:「とすると、車載レーダーは信用されてないってことだね。カメラも信頼できないし。すると、唯一信頼できるセンサはLIDARということになる」
筆者:「さあ、どうだろう。LIDARは、カメラほど視界状況の影響は受けないが、霧、雨、雪といった気象条件の影響は受けやすい。それに、LIDARは今でも非常に高価だから、当面の用途はハイエンドのレベル4とレベル5の自動運転車に限定されるだろう」
マット:「とすると、僕らにはとても手が届かない。単独で真に信頼性の高い自動運転車を実現できるセンサはない。必ず3タイプのセンサが必要だってことは、自動運転車がきわめて高価になることを意味する」
筆者:「一部は正しいよ。レベル4とレベル5の自動運転車で、信頼性の高い完全な自動運転を実現するためには、おそらくカメラ、LIDAR、レーダーという3タイプのセンサがすべて必要だ。しかし、すでに大量生産が始まっているレベル2やレベル3のエコノミーな自動車の場合は、部分的な自動運転しか要求されない。こうした分野では、TIのミリ波センサを使用したイメージング・レーダーが高い性能と優れた費用対効果を発揮して、ADASの機能が幅広く採用されるのに役立っている」
イメージング・レーダーとは
マットに説明したイメージング・レーダーは、レーダーの一類型であり、その名前は、高い角度分解能によって鮮明な画像が得られることに由来します。
イメージング・レーダーでは、複数の低消費電力のミリ波センサがカスケード接続されており、これらのセンサが同期して単一の装置として動作するとともに、多数の受信・送信チャネルがあることによって、角度分解能とレーダー測距性能が著しく向上します。カスケード接続されたミリ波センサの場合、内蔵の位相シフタによりビームフォーミングを行うことで、測距範囲を400mまで延長できます。図1は、カスケード接続されたミリ波センサをアンテナとともに搭載した評価基板です。
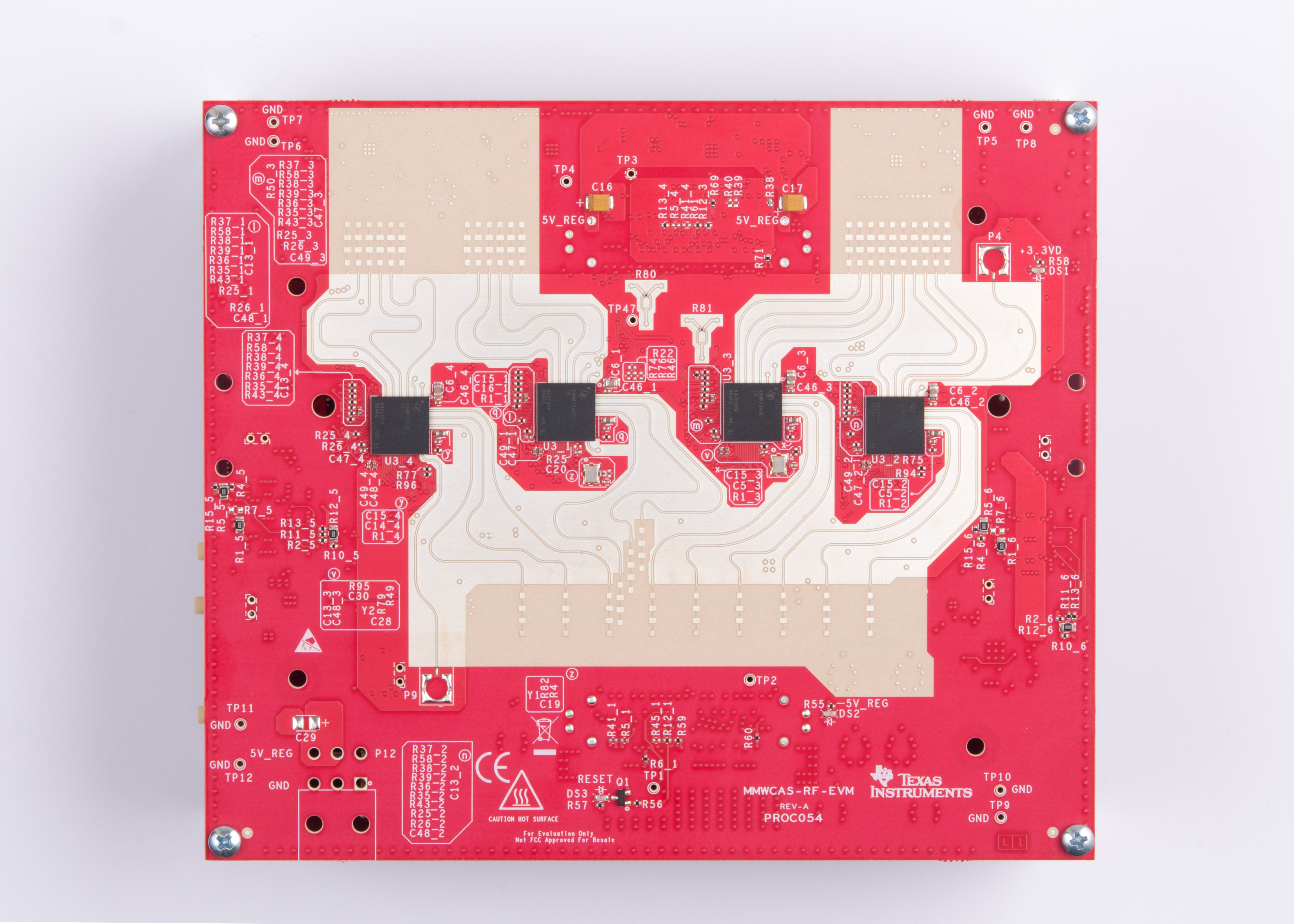
図1:4個のTIミリ波センサがカスケード接続されているイメージング・レーダー評価基板
イメージング・レーダー用ミリ波技術
最近まで、従来型のレーダー・センサは自動車のプライマリ・センサとされることはありませんでした。それは主に、角度分解能が限定されているからです。
角度分解能とは、同じ距離、同じ相対速度の物体を識別する能力のことです。
一方、イメージング・レーダーの長所に着目した一般的な使用事例では、静止物体を高分解能で特定できます。典型的なミリ波センサは、速度分解能および距離分解能が高く、移動物体の特定および識別は簡単にできますが、静止物体の場合はその性能はきわめて限定されます。
例えば、センサが車線の中央で停止している車両を「視認する」とともに、照明用の支柱やフェンスと区別できるようにするためには、水平視野角においても垂直視野角においても一定の分解能が必要です。
図2は、トンネルの中で車が動けなくなり、煙が出ている状況を示しています。この車は約100m先にあり、トンネルの高さは3mです。

図2:トンネルに接近している車のフロント・レーダーがトンネルと停止している車とを見分けるためには、十分に高い角度分解能が必要です。ミリ波センサは、煙などによる視界不良の状況でも遠くまで見通すことができます。

図3:複数入力/複数出力(MIMO)レーダーによってミリ波センサが高い垂直視野角分解能を達成している様子を示しています。
図2のトンネル内の車を特定するためには、センサはトンネルの天井や壁と車とを見分ける必要があります。
このシーン分類を行うためには、次のような水平および垂直方向の視野角分解能が必要です。
- (垂直視野角)= arctan (2 m/100 m) = 1.14度
- (水平視野角)= arctan (3.5 m/100 m) = 2度
ここで、2mはトンネルの高さから車の高さを引いた値、100mはイメージング・レーダーを搭載した接近中の車とトンネル内で停止している車との距離、3.5mは停止している車とトンネルの壁との距離です。
他の光学センサを使用する場合、特定の気象条件や視界状況では視認が困難になる可能性があります。煙、霧、悪天候、明暗の高コントラストは、カメラやLIDARなどの光学的なパッシブ・センサやアクティブ・センサの性能に悪影響を与え、対象物の特定を妨げる可能性があります。しかし、TIのミリ波センサは、気象条件や視界状況が悪い場合も安定した性能を維持します。
現在、どのような気象条件や視界状況でも堅牢性を保ち、水平および垂直両視野角ともに1度の角度分解能(超高解像アルゴリズムではさらに高精度)を達成できるセンサは、イメージング・レーダー・センサの他にはありません。
まとめ
TIのミリ波センサを使用するイメージング・レーダーは柔軟性がきわめて高く、近距離の物体を高分解能で検出して分類できるだけでなく、400mまでの遠距離にある対象物も追跡できます。この高分解能でコスト効率の優れたイメージング・レーダー・システムは、車のプライマリ・センサとしての役割を果たし、レベル2および3のADASアプリケーションや、ハイエンドのレベル4および5の自動運転車の開発に役立ちます。
その他のリソース
- TIのイメージング・レーダーの詳細については、TI imaging radar(英語)をご覧ください。
- ミリ波車載イメージング・レーダー・システムについては、ビデオ「mmWave Automotive Imaging Radar System – Long Range Detection」(英語)をご覧ください。
- 自動運転の理想と現実については、ブログ記事「Are we there yet? Expectations vs. reality in autonomous driving」(英語)をご覧ください。
- 「77GHzミリ波センサを使用した車載イメージング・レーダーのリファレンス・デザイン」を利用すれば、すぐに設計を開始できます。
※すべての登録商標および商標はそれぞれの所有者に帰属します。
※上記の記事はこちらの技術記事より翻訳転載されました。
※ご質問はE2E Support Forumにお願い致します。
