

システム内で産業用イーサネットを活用する作業に取り組んでいる設計者向けの『適切な産業イーサネット規格を選択する方法』ブログ・シリーズの 2 回目の投稿に引き続きアクセスされたことに感謝します。 このシリーズでは、アプリケーションに最適な規格を選択するための支援として、いくつかの一般的な産業用イーサネット通信プロトコルについて説明します。 Sercos III に関する以前の投稿をこちらでご覧になることもできます。
一方、今回の投稿では、EtherCAT、その最終アプリケーション、および動作方法について説明します。
EtherCAT を考案したのは、Beckhoff Automation(ベッコフ・オートメーション)社です。 2003 年以来、同社は EtherCAT Technology Group(ETG)の傘下に入っています。ETG は、約 2,600 社のメンバーが加入している、産業用フィールドバスに関する組織です。
EtherCAT は、ファクトリ・オートメーション、半導体ツール、包装用ロボットなどの分野で見受けられます。 産業用以外の分野での筆者のお気に入りは、米国ディズニーランドで開催されている World of Color(色の世界)ショーです。ここでは、EtherCAT がライト・ショーを制御しています。
技術的な側面では、EtherCAT は図 1 に示すようにマスター/スレーブ・ネットワーク・アーキテクチャを採用しています。 簡潔なライン・トポロジをサポートするために、EtherCAT スレーブには 2 つのイーサネット・コネクタが実装されています。 また、冗長性を確保する目的でリング・トポロジをサポートすることもできます。この場合は、EtherCAT マスターにも 2 個のイーサネット・ポートが必要です。 EtherCAT ネットワークは、最大 65,535 台のスレーブ・デバイスをサポートできます。

図 1: EtherCAT フレームの流れを図示した EtherCAT マスター/スレーブ・ネットワークの例
EtherCAT フレームを生成するのは、EtherCAT マスターのみです。すべてのスレーブは、このフレームを受信して処理します。 最後のスレーブは EtherCAT フレームをループバックします。このフレームは、(それ以上処理されることなく)すべてのスレーブを経由してマスターに帰されます。 EtherCAT フレーム内には、各スレーブに対応するプロセス・データを格納するためのスペースが予約されています。どのスレーブも、フレームの長さ自体を変更することはありません。 このフレームは、複数の車両、または旅客用の複数の座席で構成された 1 編成の列車に似ています。各スレーブは、1 両の車両または 1 つの座席を割り当てられています。 EtherCAT では、「座席レベル」、つまりプロセス・データ内にあるビット・レベルまで詳細にアドレッシングを行うことができます。
EtherCAT マスターで必要とされるのは、標準的なイーサネット MAC ペリフェラルのみです。マスターは、特に、リアルタイムで EtherCAT フレームを処理する必要がないからです。マスターで実行する必要があるのは、正確なタイム・ベースで EtherCAT フレームの開始をトリガすることのみです。
EtherCAT スレーブは、特定のイーサネット・ハードウェア(EtherCAT MAC)をサポートする必要があります。スレーブは、受信した EtherCAT フレームを即座に処理する必要があるからです。代表的な実装では、図 2 に示すように、特定用途向け集積回路(ASIC)またはフィールド・プログラマブル・ゲートアレイ(FPGA)を使用します。 「即座に処理する」とは、EtherCAT フレームの受信を実行している最中に、EtherCAT MAC がこのフレームを処理することを意味します。 代表的な EtherCAT デバイスでは、受信フレームと送信フレームの間で、1μs というポート相互間遅延が生じます。

図 2: ASIC/FPGA と外部プロセッサを搭載した EtherCAT スレーブ
EtherCAT 規格は、EtherCAT ネットワーク内で他の種類のイーサネット・フレームを使用することを許可していません。 これは主に、EtherCAT フレームが使用できるように、リアルタイム・イーサネット・チャネルを常に空けておくためです。 EtherCAT 以外のフレーム(EtherType が「EtherCAT」に一致しないフレーム)が EtherCAT ネットワーク内で見つかった場合は、EtherCAT スレーブはフレームのチェックサム(CRC)を無効にすることで、そのフレームを破棄します。 この結果、標準的なイーサネット・デバイス向けのフレーム、つまり EtherCAT 以外のフレームは、EtherCAT にとって無益なものとなり、遅かれ早かれ、EtherCAT ネットワークを汚染することは防止されます。
ただし、イーサネット・フレームを EtherCAT フレーム内にカプセル化する方法により、標準的なイーサネット・フレーム(TCP/IP(伝送制御プロトコル/インターネット・プロトコル)や UDP(ユーザー・データグラム・プロトコル))を EtherCAT ネットワーク経由で送信することができます。 この作業を実行するには、EtherCAT ホスト・プロセッサ・スタックの最上位にあるさまざまな EtherCAT プロファイルを使用します。 プロファイルの例として、Ethernet over EtherCAT(EtherCAT 経由のイーサネット・フレーム送信)プロファイルを挙げることができます。
EtherCAT デバイスに関するその他の特長と機能として、以下のものを挙げることができます。
- 分散クロック - スレーブとマスターの間で、高精度の時間同期手法を使用します。
- ループバックを使用したリンクダウンの高速検出イーサネット PHY トランシーバのサポートが必要) - リンクダウンを検出した時点で、イーサネット Ethernet PHY は EtherCAT ハードウェアにそのことを通知します。 10μs 以内に、EtherCAT ハードウェアは EtherCAT フレームをループバックします。 高速リンクダウン機能をサポートしている TI の TLK1xx イーサネット PHY トランシーバ・ファミリをご確認ください。
EtherCAT 用の ASIC または FPGA を使用すると、コストとボード面積が増大します。 代替ソリューションは、多くの TI Sitara™ プロセッサに搭載されている PRU-ICSS ペリフェラルを使用することです。 たとえば、TI は AM335x プロセッサ向けの PRU-ICSS ファームウェアを提供しており、外部 FPGA を使用せずに EtherCAT スレーブ・デバイスを実現することができます(図 3)。 TMDSICE3359 評価ボードを使用して、TI の EtherCAT スレーブ・ソリューションを評価できます。
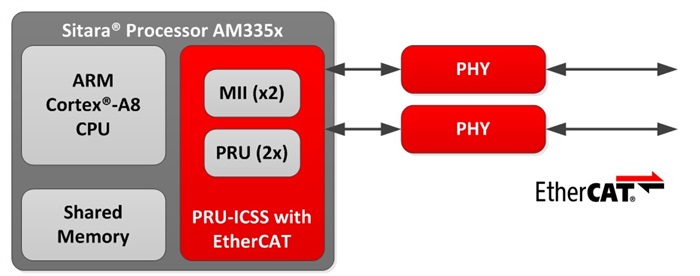
図 3: TI Sitara プロセッサに統合した EtherCAT スレーブ
EtherCAT の機能について理解するうえで、この投稿がお役に立つことを希望します。 このシリーズの他の投稿もご覧になり、多くの産業用イーサネット規格についてご確認ください。
その他のリソース
- EtherCAT 通信開発プラットフォーム TI Design リファレンス・デザインをご覧ください。
- このシリーズの以前の投稿をご覧ください。 “適切な産業イーサネット規格を選択する方法: Sercos III.”
- 次の点に関するブログ投稿をご覧ください。『産業用イーサネットを標準的なイーサネットと同等程度に簡素化する方法』
- 『Industrial Communication Solutions Guide(英語)』をダウンロードしてください
- EtherCAT について紹介するホワイト・ペーパー『EtherCAT on Sitara Processors(英語)』をご覧ください。
- 次のホワイト・ペーパー『an inside look at industrial Ethernet communication protocols(英語)』をご覧ください。
- EtherCAT 規格の詳細については、ETG Web サイト(英語)をご覧ください。
