


Other Parts Discussed in Thread: INA181, INA139
Hi,
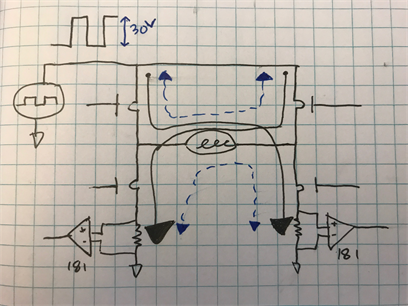
I design an application to drive a DC motor using an H-bridge and a PWM to set the speed.
My main concern is to know if a motor is stuck, I do not want to do it using my speed sensing block as it has other uses.
I would like to sense the current and understand when access current is drawn.
My max voltage is 30V drawn from the battery. average voltage is 18V (using the PWM), average current is about 10A.
From looking through the parts I see two options:
1. The INA240 for inline current sensing.
2. INA181 for high/ low side current sensing.
My questions are:
The motor will run in both directions so I will need a bidirectional current sensing if I will use the inline method.
suppose Vref=1.5V and VS=3V,
Using the INA240 will I Vout between 0 to 3V? 1.5 to 3 for one direction and 0 to 1.5 for the other direction?
Using the INA181 - where would it be better used? Low side or High side?
Please correct me if I am wrong but here I do not need bidirectional sensing as the current seen by the shunt resistor will always be in one direction no matter what the motor direction is right?
What is your recommendation for the best part for this specific application?
Remember that I just need to understand if the motor is stuck, i.e. excess current.
Thanks,
Tomer




{kind=link}