Other Parts Discussed in Thread: LM317
Hi to all!
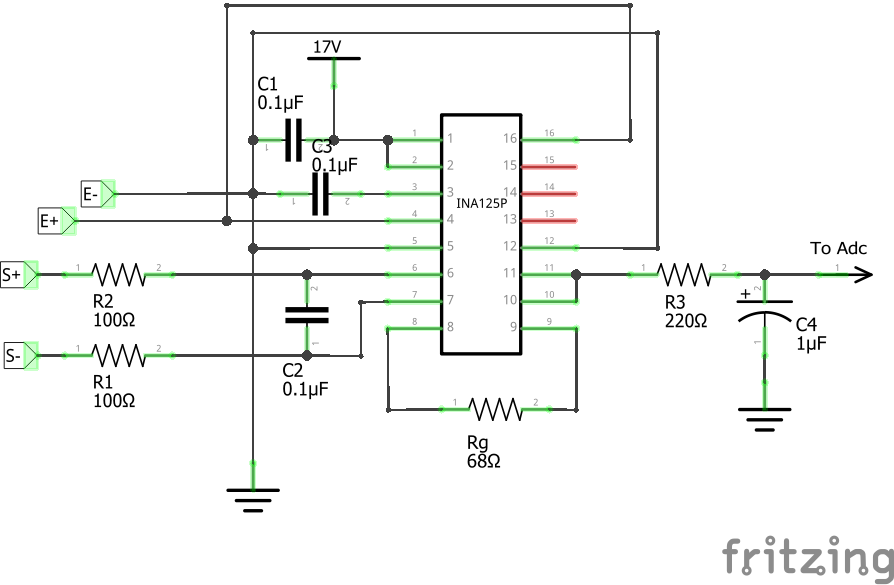
I have a problem to acquire the output signal from the INA125P. My circuit is like to this (from forum.43oh.com/.../):
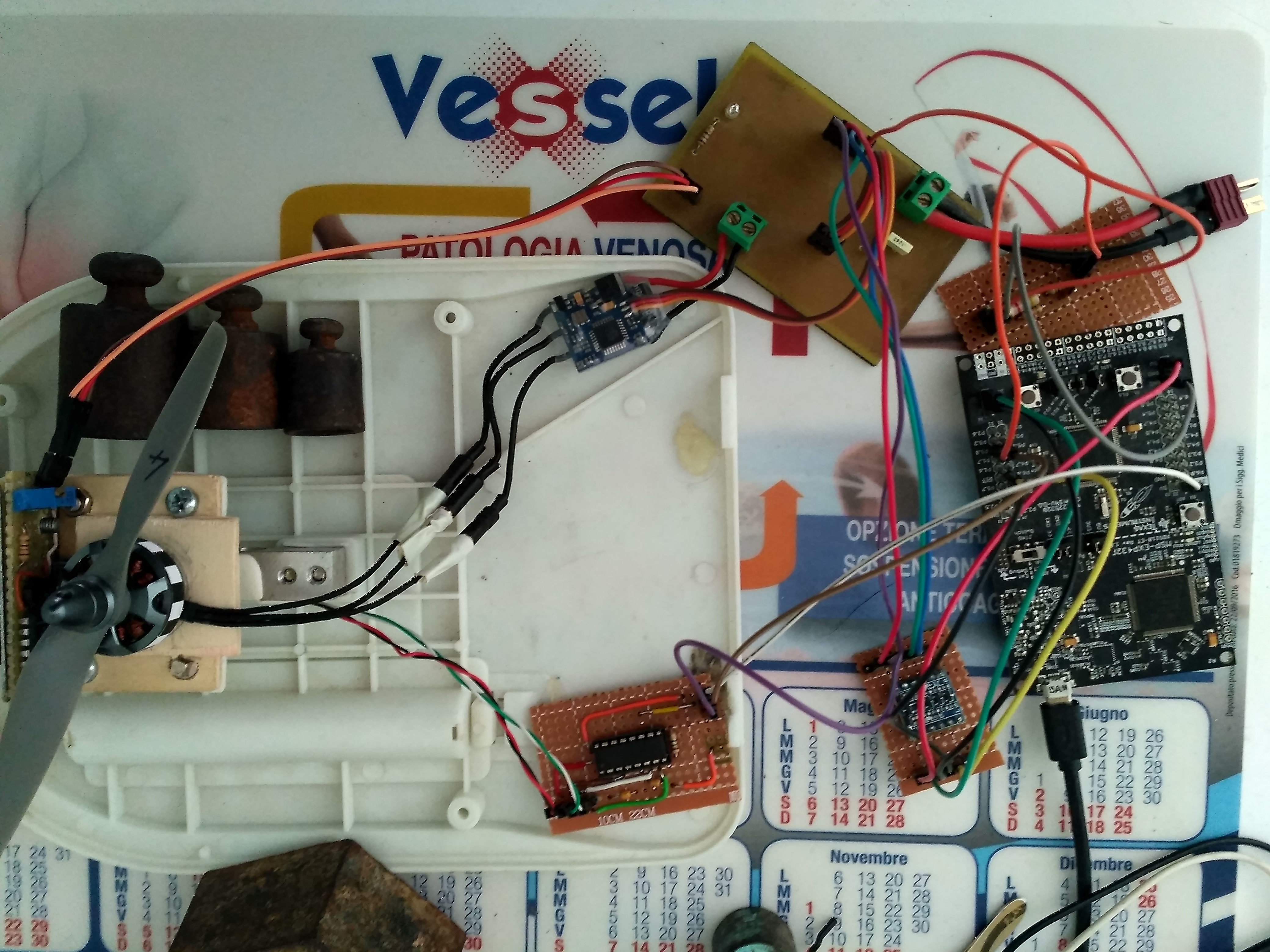
the only difference is that i have added a 0.1uF capacitor between S+ and S-. This work fine if I use it for the normal weighting operation, but work bad if i need to measure a thrust from a bldc motor with propeller.
In particular during an acquisition session i obtain this signal from adc:
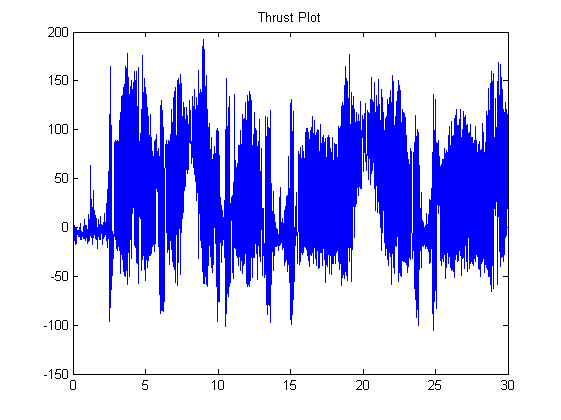
this is very noisy and unuseful signal because this signal have much negative values, so i can't use it for my purpose.
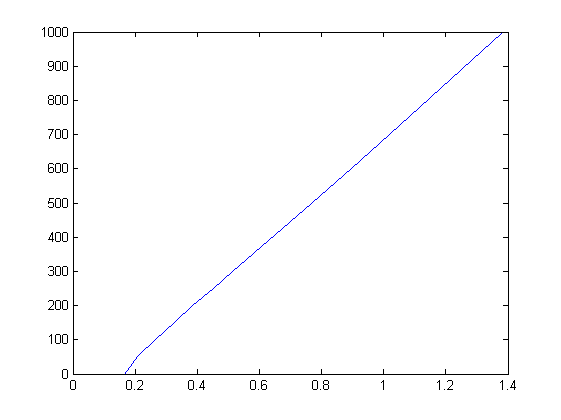
However i have tryed to insert a RC filter and i obtained some improvement:

I obtained this signal using the original circuit above ( without the 0.1uF capacitor between S+ and S- ) and a RC circuit whit R = 4.7KOhm and C = 4.7uF. I have used this value because with other values i obtain however some negative values. However this signal is less usefull because i can't measure the full thrust generated of my motor and propeller. I understand that this is due from the RC filter that isn't fast, but i not know how to improve this signal using a different value of R and C without have a negative value.
My question is, how i can improve the circuit to obtain a better and usable signal for my purpose? I'm not an electrical engineering, so i have some problem to find a solution.