Hello motor control gurus. I am not one of you.
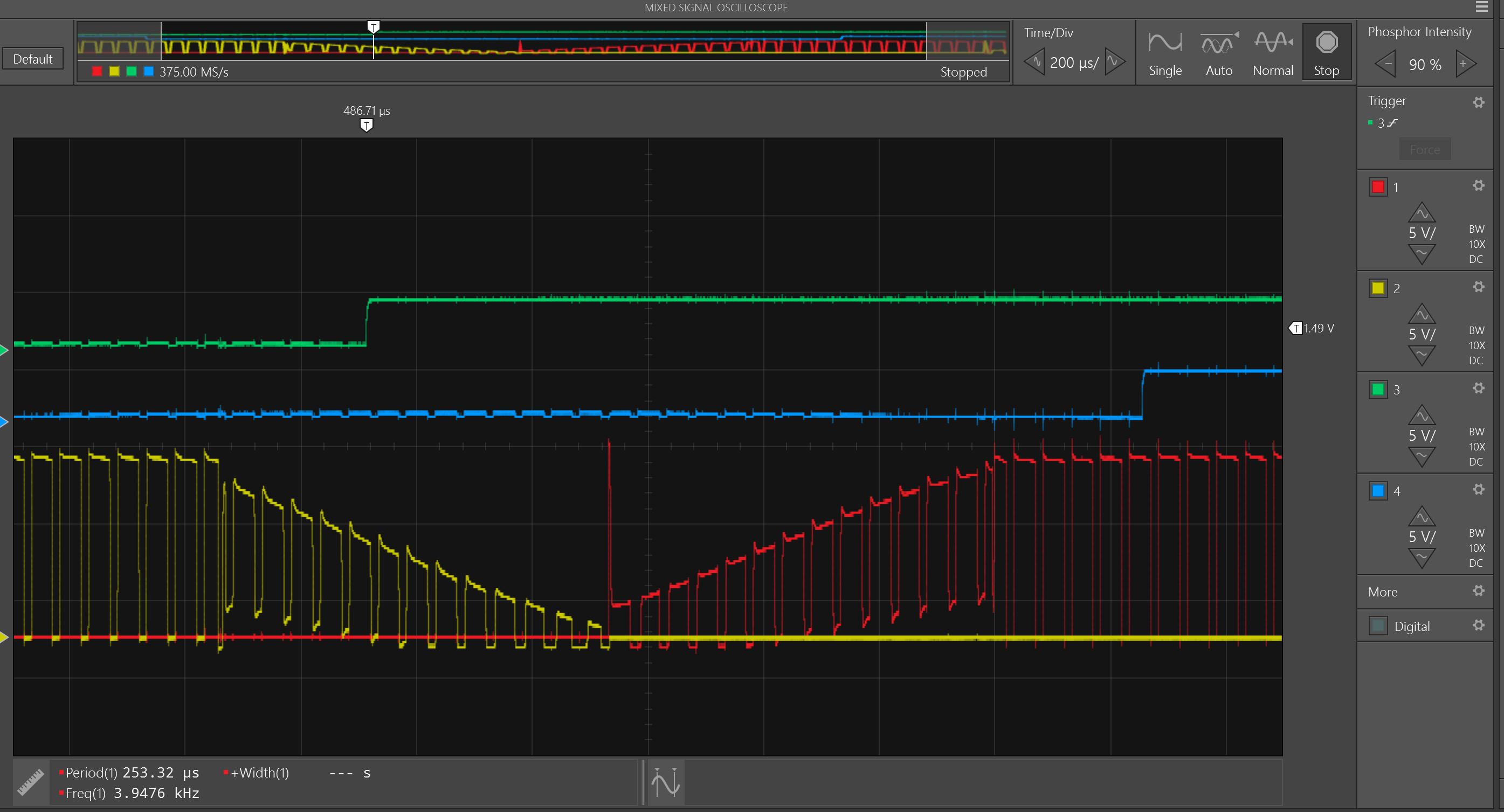
I made a BLDC control board to control an RC airplane motor- and it works well enough below 4k RPM, but goes unstable at higher RPM and loses sync. The type of control is sensorless trapezoidal high side PWM. This is the one where you use the ADC to sense the floating phase during the PWM "ON" duty, and then linear interpolate between the samples to find the exact time the signal would have crossed the Vin / 2 mark. That time is used to predict the commutation time. Inspiration came heavily from Dave Wilsons blog, TI appnotes, and Microchip appnotes.
I am using a 4 sample binary filter where each bit is either < or > the Vin / 2 and the filter looks for 0011 or 1100. Then linear interpolation to find the exact zero crossing time between sample 2 and 3. If I run the motor open loop at a fixed pwm and commutation cycle combo, I can adjust the power supply voltage until the motor is running ultra smooth and whisper quiet. So the instability is coming from my control algorithm somehow.
Per the theory the zero crossing occurs 30 degrees into a 60 degree commutation step, so if I identified the time of the zero cross TZCD, the proper commutation step time under steady state conditions would be 2 * TZCD. But that doesn't work. What works is to take the difference between the current commutation period and 2 * TZCD and add a fraction of it to the current commutation time:
Tnew = Tcurrent + B * (2 * TZCD - Tcurrent), where B is some fraction, like 1/8 or something. If B is over .5 it doesn't work, and if B is less than .1 it doesn't work. But all the values of B which let the motor run also has it oscillating and the motor loses sync at over 4000rpm.
Has anyone made a sensorless BLDC motor controller and had a similar problem? Is there a better commutation or filter algorithm? I tried keeping track of previous Tcommutation with a running average but that doesn't seem to work unless the running average is less than 4 samples, and even then the oscillation is the same.