Other Parts Discussed in Thread: DRV8880
DRV8884 is used for driving a stepper motor. The design parameters are,
1. RREF = 562K
2. TRQ = 1
3. DECAY = tied to DVDD (slow decay)
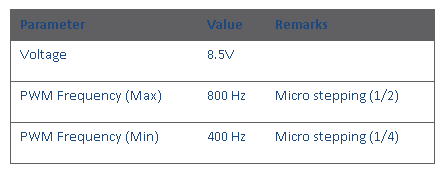
4. We use both 1/4 and 1/2 stepping modes in our design and two PWM frequency - 400Hz and 800Hz.
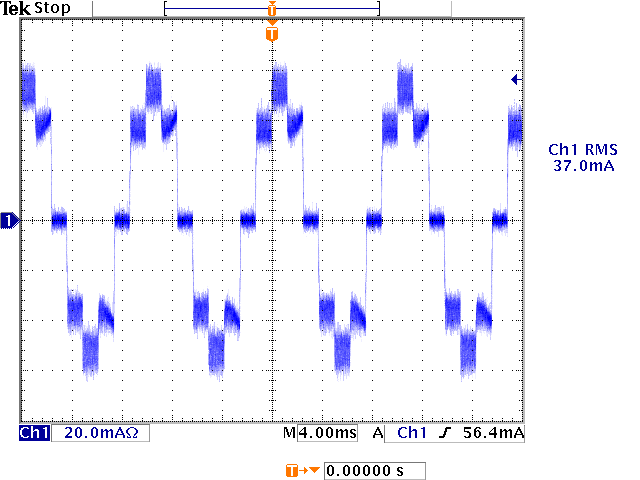
Theoretically, by using a 562k RREF resistor should result in 53mA max current when the motor is running (37.7mA RMS).
When measured the max. current appears to be close to this - 60mA (there may be some error in the 562k resistor, the DRV8884 and the probe.)
But the measure data of motor current for the same motor but different hardware board, shows larger than 10% variation. Could you please suggest how to let the output current more stable?