Part Number: DLP3000
Hi,
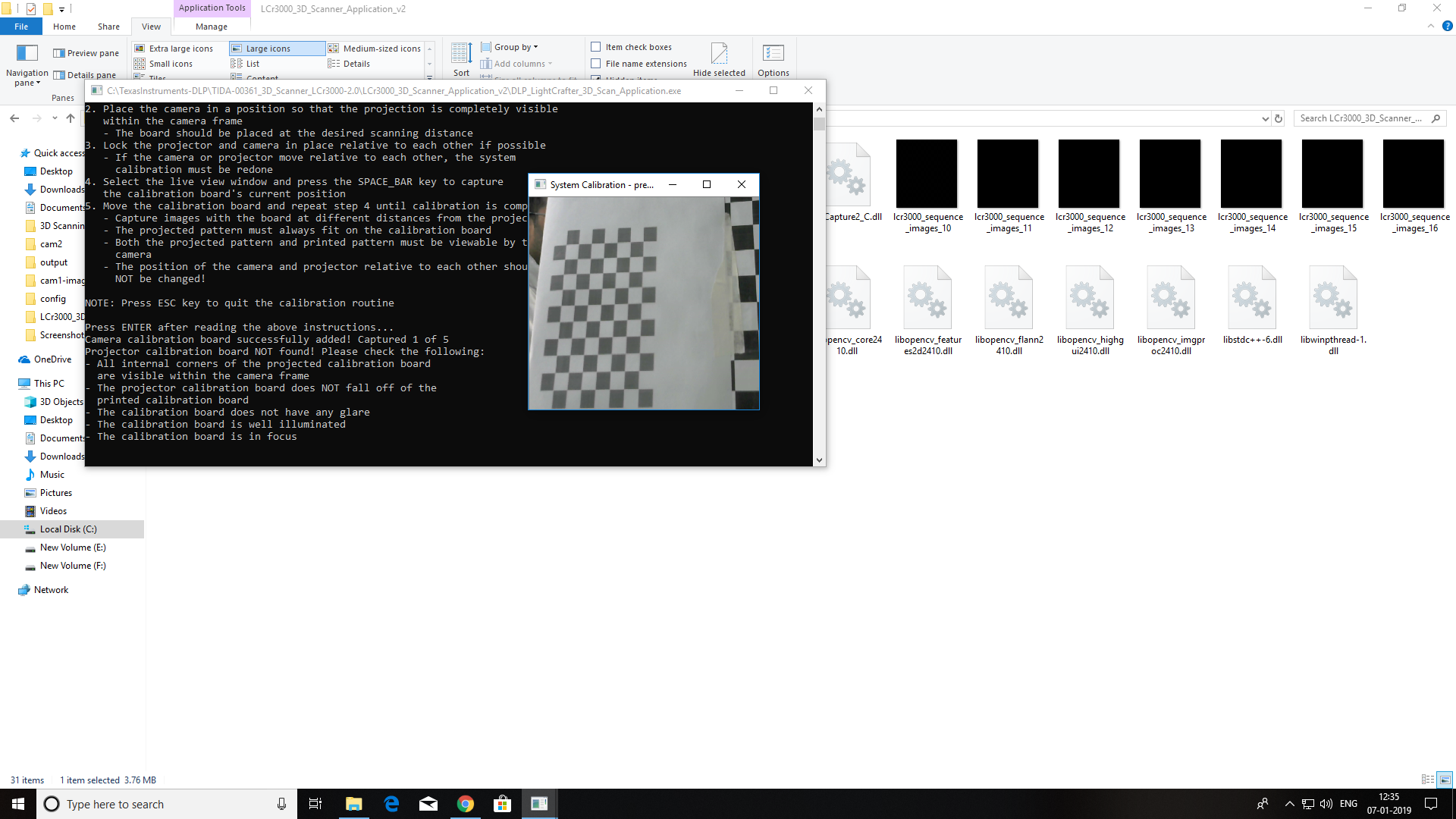
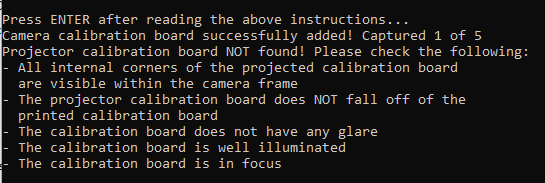
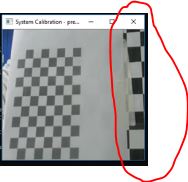
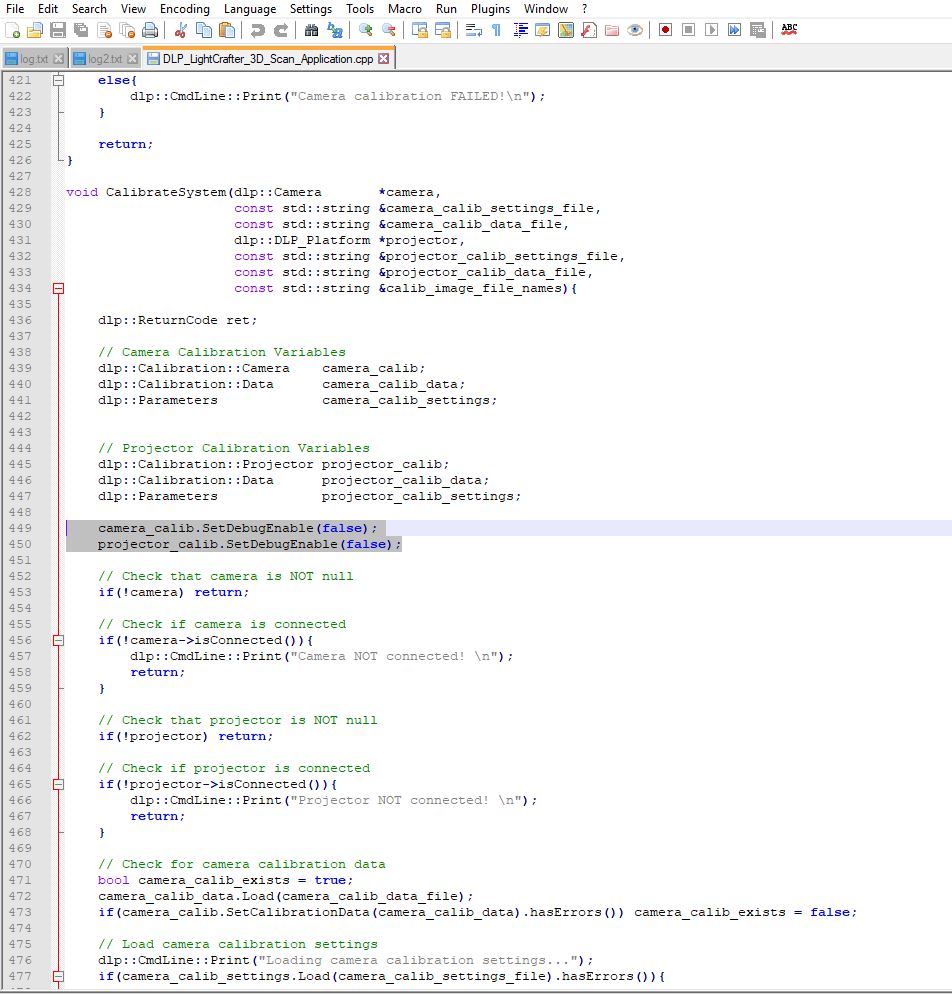
Need help with projector calibration part/ When I run DLP_LightCrafter_3D_Scan_Application.exe , executed options 1,3 and 4 successfully. When I run option 5 i.e calibrate system, I don't see any checkerboard been projected by projector. And images which get created i.e. from lcr3000_sequence_images_10.bmp to lcr3000_sequence_images_21.bmp are complete black images. PFA screenshots.
Note: I am not using point grey camera. I am using OpenCV compatible webcam. I can calibrate camera and also I do get camera calibration parameters. thanks in advance