Other Parts Discussed in Thread: ISO1042, ISOW7841
We are planning on using these isolation devices in our application to isolate CAN busses, however in reviewing detail implementation I came across design obstacle. Per CAN standard
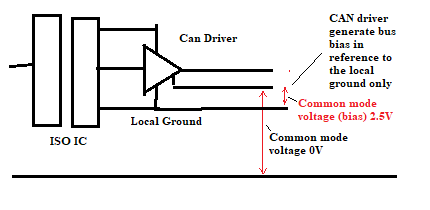
ISO11898-2:2016 section 5.10 seem to require bus biasing to be implemented on CAN busses. The bus bias is typically 2.5V in reference to common system ground (not floating ground of the isolator device) since all the downstream CAN devices share system ground not local floating ground of ISOW7842 chip. In reference design for CAN busses http://www.ti.com/lit/ug/tiducv9/tiducv9.pdf there's no indication how this is achieved. But the waveforms in that document do show 2.5V common mode offset on the busses. For CAN bus operation I don't believe bus bias is necessary to operate however that's not what seem implied by the standard.
Unfortunately putting external bias using resistor dividers defeats the whole point of high voltage isolation since those resistors must be refereced to system ground and be very large value and handle the kV surge voltages. Also, I believe it violates 50k max resistance specification from each CAN_H or CAN_L to GND specification, if those resistors need to be larger than 50k.
Is this common mode bus bias necessary for industry application when doing CAN isolated design using ICs like ISOW7842 or can this bias be set to 0V? How did others overcome this problem?
Thank you for your feedback.