Hi Trey,
I have faced a trouble with CAN communication.I'm workin on Delfino experimenter kit has F28335 controlCard.
My problem is;
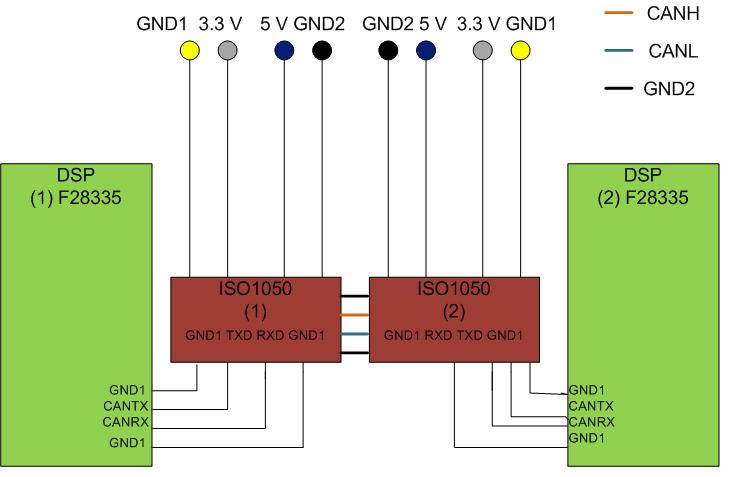
I have 2 nodes on the CAN Bus .One of them is listener,the other one is talker.There is no problem with talker but the listener.I'm trying to realize the listener node.I changed the code of the ssqc019 lab11_2 according to my desires.I can build the new code but it does not work on the circuit.I have a doubt I miss something on the code.
When I debug the code,code does not entire the condition of
if(ECanaRegs.CANRMP.bit.RMP1== 1 ) // control valid new data in MBX1?
we can say there is an assigning mistake with ID?
or overwritten problem occurs?
duties of nodes:
Talker node sends 4 byte data every 10 ms with ID=2005 (integer) @ 208.333kbit/s
Listener node receives these data and display on 16 leds @208.333kbit/s
I added 3 files changed myself.(btw there is no linking problem)
Please let me know what I have missed?(I added neccessary some notes respect to changes)
4118.canreceivernode.txt
//
// Lab5_1: TMS320F28335
// (c) Frank Bormann
//
//###########################################################################
//
//
// FILE: Lab11_2.c
//
// TITLE: CAN - Receive via F28335controlCARD
// and SH65HVD230 at Peripheral Explorer Board
//
// Extended CAN-Frame is received with 100 kbit/s
//
// Objective:
// Receive a 1 Byte data frame with Identifier 0x10000000
// and display 4 least significant bits of byte0 at 4 LEDs
//
// Mailbox 1 is receiver
// Identifier : 0x1000 0000
// Data Length Code (DLC) = 1
// eCANA is at GPIO31 (CANTXA) and GPIO30 (CANRXA)
//
// Frequency Osscillator @F28335controlCARD: 30MHz
// PLLCR = 10 : multiply by 5
// SYSCLKOUT = 150MHz , 28335-CAN-CLKIN = 75MHz
// CAN - Bit timing set in file "DSP2833x_ECan.c" for 100 kbit/s:
// TQ = (49 +1) / 75 MHz = 0.667 us: BRPREG = 49
// tseg1 = 1us (10+1) = 7.333 us; TSEG1REG = 10
// tseg2 = 1us (2+1) = 2 us; TSEG2REG = 2
// By A.A
//Editing: Used F28335 controlCARD Release 2.2,TMDSCNCD28335 R2.2
// Extended Can frame is received with 208.33 kbit/s
// objective:
// Receive 4 byte data frame with identifier 0x000007D5 // unsigned long ID= 2005
// eCANA is at GPIO31 (CANTXA) and GPIO30 (CANRXA)
// Frequency Osscillator @F28335controlCARD: 30MHz
// PLLCR = 10 : multiply by 5
// SYSCLKOUT = 150MHz , 28335-CAN-CLKIN = 75MHz
// CAN - Bit timing set in file "DSP2833x_ECan.c" for 208.33 kbit/s:
// TQ = (23 +1) / 75 MHz = 0.32 us: BRPREG = 23
// tseg1 = 0.32u*(10+1) = 3.52 us; TSEG1REG = 10
// tseg2 = 0.32u* (2+1) = 0.96 us; TSEG2REG = 2
// tcan=tseg1+tseg2+TQ=3.52+0.96+0.32=4,8u => 208,3333333kbit/s
//
// GPIO pins are used to display the received data on 16 leds
// This written code for listener node whose talker node sends 4 byte data every 10ms
//
//###########################################################################
// Ver | dd mmm yyyy | Who | Description of changes
// =====|=============|======|===============================================
// 3.0 | 02 May 2008 | F.B. | Lab5_1 for F28335;
// 3.1 | 06 Nov 2009 | F.B | Lab5_1 for F28335 and PE revision5
//###########################################################################
#include "DSP2833x_Device.h"
// external function prototypes
extern void InitSysCtrl(void);
extern void InitPieCtrl(void);
extern void InitPieVectTable(void);
extern void InitCpuTimers(void);
extern void InitECan(void);
extern void ConfigCpuTimer(struct CPUTIMER_VARS *, float, float);
extern void InitECan(void);
// Prototype statements for functions found within this file.
void Gpio_select(void);//I/O se�imi,register ayarlar1
interrupt void cpu_timer0_isr(void);
//###########################################################################
// main code
//###########################################################################
void main(void)
{
struct ECAN_REGS ECanaShadow; // local copy of CANA registers
Uint16 temp;//1st byte
Uint16 temp2;//2nd byte
Uint16 temp3;//3th byte
Uint16 temp4;//4th byte
InitSysCtrl(); // Basic Core Init from DSP2833x_SysCtrl.c
EALLOW;
SysCtrlRegs.WDCR= 0x00AF; // Re-enable the watchdog
EDIS; // 0x00AF to NOT disable the Watchdog, Prescaler = 64
DINT; // Disable all interrupts
Gpio_select();
/* Initialize the CAN module */
// NOTE: first modify TI-file: InitECan() to 100kbps by setting BTR = 49
//edit:changed the values to 208.33kbps by setting BTR=23
InitECan();
/* Write to Mailbox 1 message ID field */
ECanaMboxes.MBOX1.MSGID.all = 0x000007D5; // messsage ID=2005 is set as integer
ECanaMboxes.MBOX1.MSGID.bit.IDE = 1; // Extended Identifier
/* Configure Mailbox 1 as Receiver mailbox */
ECanaShadow.CANMD.all = ECanaRegs.CANMD.all;
ECanaShadow.CANMD.bit.MD1 = 1;
ECanaRegs.CANMD.all = ECanaShadow.CANMD.all;
/* Enable Mailbox 1 */
ECanaShadow.CANME.all = ECanaRegs.CANME.all;
ECanaShadow.CANME.bit.ME1 = 1;
ECanaRegs.CANME.all = ECanaShadow.CANME.all;
InitPieCtrl(); // clear all pending PIE-Interrupts and to disable all PIE interrupt lines
InitPieVectTable(); // default ISR's in PIE,This function will initialize the PIE-memory to an initial state.
EALLOW;//Cputimeri PIE icerisinden re-map ediyoruz
PieVectTable.TINT0 = &cpu_timer0_isr;
EDIS;
InitCpuTimers(); // basic setup CPU Timer0, 1 and 2,Timer0 set edildi
ConfigCpuTimer(&CpuTimer0,150,100000); // CPU - Timer0 at 100 milliseconds
//parametre1=adress of core,parametre2=internal speed of DSP,paramtre3=period time for timer overflow
PieCtrlRegs.PIEIER1.bit.INTx7 = 1;//to enable interupt mask of cputimer
IER |=1;//enable interrupt core INT1
EINT;//enable control interrupt lines 2 macros
ERTM;//.......
CpuTimer0Regs.TCR.bit.TSS = 0; // start timer0
while(1)
{
while(CpuTimer0.InterruptCount == 0);
CpuTimer0.InterruptCount = 0;
EALLOW;
SysCtrlRegs.WDKEY = 0x55; // service WD #1
EDIS;
if(ECanaRegs.CANRMP.bit.RMP1== 1 ) // control valid new data in MBX1?
{
temp = ECanaMboxes.MBOX1.MDL.byte.BYTE0; // byte zero read message,load it temp,
temp2=ECanaMboxes.MBOX1.MDL.byte.BYTE1;
temp3=ECanaMboxes.MBOX1.MDL.byte.BYTE2;
temp4=ECanaMboxes.MBOX1.MDL.byte.BYTE3;
ECanaRegs.CANRMP.bit.RMP1 = 1; // clear the status flag RMP1
if(temp&1) GpioDataRegs.GPBSET.bit.GPIO59=1;
else GpioDataRegs.GPBCLEAR.bit.GPIO59 = 1;
if(temp&2) GpioDataRegs.GPBSET.bit.GPIO61=1;
else GpioDataRegs.GPBCLEAR.bit.GPIO61=1;
if(temp&4) GpioDataRegs.GPASET.bit.GPIO1=1;
else GpioDataRegs.GPACLEAR.bit.GPIO1=1;
if(temp&8) GpioDataRegs.GPASET.bit.GPIO3=1;
else GpioDataRegs.GPACLEAR.bit.GPIO3=1;
if(temp2&1) GpioDataRegs.GPASET.bit.GPIO5=1;
else GpioDataRegs.GPACLEAR.bit.GPIO5=1;
if(temp2&2) GpioDataRegs.GPASET.bit.GPIO7=1;
else GpioDataRegs.GPACLEAR.bit.GPIO7=1;
if(temp2&4) GpioDataRegs.GPASET.bit.GPIO9=1;
else GpioDataRegs.GPACLEAR.bit.GPIO9=1;
if(temp2&8) GpioDataRegs.GPASET.bit.GPIO11=1;
else GpioDataRegs.GPACLEAR.bit.GPIO11=1;
if(temp3&1) GpioDataRegs.GPBSET.bit.GPIO49=1;
else GpioDataRegs.GPBCLEAR.bit.GPIO49=1;
if(temp3&2) GpioDataRegs.GPCSET.bit.GPIO85=1;
else GpioDataRegs.GPCCLEAR.bit.GPIO85=1;
if(temp3&4) GpioDataRegs.GPASET.bit.GPIO13=1;
else GpioDataRegs.GPACLEAR.bit.GPIO13=1;
if(temp3&8) GpioDataRegs.GPASET.bit.GPIO14=1;
else GpioDataRegs.GPACLEAR.bit.GPIO14=1;
if(temp4&1) GpioDataRegs.GPASET.bit.GPIO25=1;
else GpioDataRegs.GPACLEAR.bit.GPIO25=1;
if(temp4&2) GpioDataRegs.GPASET.bit.GPIO21=1;
else GpioDataRegs.GPACLEAR.bit.GPIO21=1;
if(temp4&4) GpioDataRegs.GPASET.bit.GPIO23=1;
else GpioDataRegs.GPACLEAR.bit.GPIO23=1;
if(temp4&8) GpioDataRegs.GPASET.bit.GPIO29=1;
else GpioDataRegs.GPACLEAR.bit.GPIO29=1;
}
}
}
void Gpio_select(void)
{
EALLOW;
GpioCtrlRegs.GPAMUX1.all = 0; // GPIO15 ... GPIO0 = General Puropse I/O
GpioCtrlRegs.GPAMUX2.all = 0; // GPIO31 ... GPIO16 = General Purpose I/O
GpioCtrlRegs.GPAMUX2.bit.GPIO30 = 1; // CANA_RX
GpioCtrlRegs.GPAMUX2.bit.GPIO31 = 1; // CANA_TX
GpioCtrlRegs.GPBMUX1.all = 0; // GPIO47 ... GPIO32 = General Purpose I/O
GpioCtrlRegs.GPBMUX2.all = 0; // GPIO63 ... GPIO48 = General Purpose I/O
GpioCtrlRegs.GPCMUX1.all = 0; // GPIO79 ... GPIO64 = General Purpose I/O
GpioCtrlRegs.GPCMUX2.all = 0; // GPIO87 ... GPIO80 = General Purpose I/O
GpioCtrlRegs.GPADIR.all = 0;
GpioCtrlRegs.GPADIR.bit.GPIO1=1;
GpioCtrlRegs.GPADIR.bit.GPIO3=1;
GpioCtrlRegs.GPADIR.bit.GPIO5=1;
GpioCtrlRegs.GPADIR.bit.GPIO7=1;
GpioCtrlRegs.GPADIR.bit.GPIO9=1;
GpioCtrlRegs.GPADIR.bit.GPIO11=1;
GpioCtrlRegs.GPADIR.bit.GPIO13=1;
GpioCtrlRegs.GPADIR.bit.GPIO14=1;
GpioCtrlRegs.GPADIR.bit.GPIO25=1;
GpioCtrlRegs.GPADIR.bit.GPIO27=1;
GpioCtrlRegs.GPADIR.bit.GPIO21=1;
GpioCtrlRegs.GPADIR.bit.GPIO23=1;
GpioCtrlRegs.GPADIR.bit.GPIO29=1;
GpioCtrlRegs.GPBDIR.all = 0; // GPIO63-32 as inputs
GpioCtrlRegs.GPBDIR.bit.GPIO49=1;
GpioCtrlRegs.GPBDIR.bit.GPIO59=1;
GpioCtrlRegs.GPBDIR.bit.GPIO61=1;
GpioCtrlRegs.GPCDIR.all=0;//lines in c will be digital input
GpioCtrlRegs.GPCDIR.bit.GPIO85=1;
EDIS;
}
interrupt void cpu_timer0_isr(void)
{
CpuTimer0.InterruptCount++;
EALLOW;
SysCtrlRegs.WDKEY = 0xAA; // service WD #2
EDIS;
PieCtrlRegs.PIEACK.all = PIEACK_GROUP1;
}
//===========================================================================
// End of SourceCode.
//===========================================================================
7711.DSP2833x_ECan.txt
// TI File $Revision: /main/8 $
// Checkin $Date: June 25, 2008 15:19:07 $
//###########################################################################
//
// FILE: DSP2833x_ECan.c
//
// TITLE: DSP2833x Enhanced CAN Initialization & Support Functions.
//
//###########################################################################
// $TI Release: DSP2833x/DSP2823x C/C++ Header Files V1.31 $
// $Release Date: August 4, 2009 $
//###########################################################################
#include "DSP2833x_Device.h" // DSP2833x Headerfile Include File
#include "DSP2833x_Examples.h" // DSP2833x Examples Include File
//---------------------------------------------------------------------------
// InitECan:
//---------------------------------------------------------------------------
// This function initializes the eCAN module to a known state.
//
void InitECan(void)
{
InitECana();
#if DSP28_ECANB
InitECanb();
#endif // if DSP28_ECANB
}
void InitECana(void) // Initialize eCAN-A module
{
/* Create a shadow register structure for the CAN control registers. This is
needed, since only 32-bit access is allowed to these registers. 16-bit access
to these registers could potentially corrupt the register contents or return
false data. This is especially true while writing to/reading from a bit
(or group of bits) among bits 16 - 31 */
struct ECAN_REGS ECanaShadow;
EALLOW; // EALLOW enables access to protected bits
/* Configure eCAN RX and TX pins for CAN operation using eCAN regs*/
ECanaShadow.CANTIOC.all = ECanaRegs.CANTIOC.all;
ECanaShadow.CANTIOC.bit.TXFUNC = 1;
ECanaRegs.CANTIOC.all = ECanaShadow.CANTIOC.all;
ECanaShadow.CANRIOC.all = ECanaRegs.CANRIOC.all;
ECanaShadow.CANRIOC.bit.RXFUNC = 1;
ECanaRegs.CANRIOC.all = ECanaShadow.CANRIOC.all;
/* Configure eCAN for HECC mode - (reqd to access mailboxes 16 thru 31) */
// HECC mode also enables time-stamping feature
ECanaShadow.CANMC.all = ECanaRegs.CANMC.all;
ECanaShadow.CANMC.bit.SCB = 1;
ECanaRegs.CANMC.all = ECanaShadow.CANMC.all;
/* Initialize all bits of 'Master Control Field' to zero */
// Some bits of MSGCTRL register come up in an unknown state. For proper operation,
// all bits (including reserved bits) of MSGCTRL must be initialized to zero
ECanaMboxes.MBOX0.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX1.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX2.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX3.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX4.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX5.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX6.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX7.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX8.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX9.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX10.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX11.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX12.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX13.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX14.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX15.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX16.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX17.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX18.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX19.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX20.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX21.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX22.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX23.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX24.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX25.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX26.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX27.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX28.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX29.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX30.MSGCTRL.all = 0x00000000;
ECanaMboxes.MBOX31.MSGCTRL.all = 0x00000000;
// TAn, RMPn, GIFn bits are all zero upon reset and are cleared again
// as a matter of precaution.
ECanaRegs.CANTA.all = 0xFFFFFFFF; /* Clear all TAn bits */
ECanaRegs.CANRMP.all = 0xFFFFFFFF; /* Clear all RMPn bits */
ECanaRegs.CANGIF0.all = 0xFFFFFFFF; /* Clear all interrupt flag bits */
ECanaRegs.CANGIF1.all = 0xFFFFFFFF;
/* Configure bit timing parameters for eCANA*/
ECanaShadow.CANMC.all = ECanaRegs.CANMC.all;
ECanaShadow.CANMC.bit.CCR = 1 ; // Set CCR = 1
ECanaRegs.CANMC.all = ECanaShadow.CANMC.all;
ECanaShadow.CANES.all = ECanaRegs.CANES.all;
do
{
ECanaShadow.CANES.all = ECanaRegs.CANES.all;
} while(ECanaShadow.CANES.bit.CCE != 1 ); // Wait for CCE bit to be set..
ECanaShadow.CANBTC.all = 0;
#if (CPU_FRQ_150MHZ) // CPU_FRQ_150MHz is defined in DSP2833x_Examples.h
/* The following block for all 150 MHz SYSCLKOUT (75 MHz CAN clock) - default. Bit rate = 208.33 khz bps
See Note at End of File */
//208.33kbit e g�re ayarland�
ECanaShadow.CANBTC.bit.BRPREG = 23;
ECanaShadow.CANBTC.bit.TSEG2REG = 2;
ECanaShadow.CANBTC.bit.TSEG1REG = 10;
#endif
#if (CPU_FRQ_100MHZ) // CPU_FRQ_100MHz is defined in DSP2833x_Examples.h
/* The following block is only for 100 MHz SYSCLKOUT (50 MHz CAN clock). Bit rate = 1 Mbps
See Note at End of File */
ECanaShadow.CANBTC.bit.BRPREG = 4;
ECanaShadow.CANBTC.bit.TSEG2REG = 1;
ECanaShadow.CANBTC.bit.TSEG1REG = 6;
#endif
ECanaShadow.CANBTC.bit.SAM = 1;
ECanaRegs.CANBTC.all = ECanaShadow.CANBTC.all;
ECanaShadow.CANMC.all = ECanaRegs.CANMC.all;
ECanaShadow.CANMC.bit.CCR = 0 ; // Set CCR = 0
ECanaRegs.CANMC.all = ECanaShadow.CANMC.all;
ECanaShadow.CANES.all = ECanaRegs.CANES.all;
do
{
ECanaShadow.CANES.all = ECanaRegs.CANES.all;
} while(ECanaShadow.CANES.bit.CCE != 0 ); // Wait for CCE bit to be cleared..
/* Disable all Mailboxes */
ECanaRegs.CANME.all = 0; // Required before writing the MSGIDs
EDIS;
}
#if (DSP28_ECANB)
void InitECanb(void) // Initialize eCAN-B module
{
/* Create a shadow register structure for the CAN control registers. This is
needed, since only 32-bit access is allowed to these registers. 16-bit access
to these registers could potentially corrupt the register contents or return
false data. This is especially true while writing to/reading from a bit
(or group of bits) among bits 16 - 31 */
struct ECAN_REGS ECanbShadow;
EALLOW; // EALLOW enables access to protected bits
/* Configure eCAN RX and TX pins for CAN operation using eCAN regs*/
ECanbShadow.CANTIOC.all = ECanbRegs.CANTIOC.all;
ECanbShadow.CANTIOC.bit.TXFUNC = 1;
ECanbRegs.CANTIOC.all = ECanbShadow.CANTIOC.all;
ECanbShadow.CANRIOC.all = ECanbRegs.CANRIOC.all;
ECanbShadow.CANRIOC.bit.RXFUNC = 1;
ECanbRegs.CANRIOC.all = ECanbShadow.CANRIOC.all;
/* Configure eCAN for HECC mode - (reqd to access mailboxes 16 thru 31) */
ECanbShadow.CANMC.all = ECanbRegs.CANMC.all;
ECanbShadow.CANMC.bit.SCB = 1;
ECanbRegs.CANMC.all = ECanbShadow.CANMC.all;
/* Initialize all bits of 'Master Control Field' to zero */
// Some bits of MSGCTRL register come up in an unknown state. For proper operation,
// all bits (including reserved bits) of MSGCTRL must be initialized to zero
ECanbMboxes.MBOX0.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX1.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX2.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX3.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX4.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX5.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX6.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX7.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX8.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX9.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX10.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX11.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX12.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX13.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX14.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX15.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX16.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX17.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX18.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX19.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX20.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX21.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX22.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX23.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX24.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX25.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX26.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX27.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX28.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX29.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX30.MSGCTRL.all = 0x00000000;
ECanbMboxes.MBOX31.MSGCTRL.all = 0x00000000;
// TAn, RMPn, GIFn bits are all zero upon reset and are cleared again
// as a matter of precaution.
ECanbRegs.CANTA.all = 0xFFFFFFFF; /* Clear all TAn bits */
ECanbRegs.CANRMP.all = 0xFFFFFFFF; /* Clear all RMPn bits */
ECanbRegs.CANGIF0.all = 0xFFFFFFFF; /* Clear all interrupt flag bits */
ECanbRegs.CANGIF1.all = 0xFFFFFFFF;
/* Configure bit timing parameters for eCANB*/
ECanbShadow.CANMC.all = ECanbRegs.CANMC.all;
ECanbShadow.CANMC.bit.CCR = 1 ; // Set CCR = 1
ECanbRegs.CANMC.all = ECanbShadow.CANMC.all;
ECanbShadow.CANES.all = ECanbRegs.CANES.all;
do
{
ECanbShadow.CANES.all = ECanbRegs.CANES.all;
} while(ECanbShadow.CANES.bit.CCE != 1 ); // Wait for CCE bit to be cleared..
ECanbShadow.CANBTC.all = 0;
#if (CPU_FRQ_150MHZ) // CPU_FRQ_150MHz is defined in DSP2833x_Examples.h
/* The following block for all 150 MHz SYSCLKOUT (75 MHz CAN clock) - default. Bit rate = 1 Mbps
See Note at end of file */
ECanbShadow.CANBTC.bit.BRPREG = 4;
ECanbShadow.CANBTC.bit.TSEG2REG = 2;
ECanbShadow.CANBTC.bit.TSEG1REG = 10;
#endif
#if (CPU_FRQ_100MHZ) // CPU_FRQ_100MHz is defined in DSP2833x_Examples.h
/* The following block is only for 100 MHz SYSCLKOUT (50 MHz CAN clock). Bit rate = 1 Mbps
See Note at end of file */
ECanbShadow.CANBTC.bit.BRPREG = 4;
ECanbShadow.CANBTC.bit.TSEG2REG = 1;
ECanbShadow.CANBTC.bit.TSEG1REG = 6;
#endif
ECanbShadow.CANBTC.bit.SAM = 1;
ECanbRegs.CANBTC.all = ECanbShadow.CANBTC.all;
ECanbShadow.CANMC.all = ECanbRegs.CANMC.all;
ECanbShadow.CANMC.bit.CCR = 0 ; // Set CCR = 0
ECanbRegs.CANMC.all = ECanbShadow.CANMC.all;
ECanbShadow.CANES.all = ECanbRegs.CANES.all;
do
{
ECanbShadow.CANES.all = ECanbRegs.CANES.all;
} while(ECanbShadow.CANES.bit.CCE != 0 ); // Wait for CCE bit to be cleared..
/* Disable all Mailboxes */
ECanbRegs.CANME.all = 0; // Required before writing the MSGIDs
EDIS;
}
#endif // if DSP28_ECANB
//---------------------------------------------------------------------------
// Example: InitECanGpio:
//---------------------------------------------------------------------------
// This function initializes GPIO pins to function as eCAN pins
//
// Each GPIO pin can be configured as a GPIO pin or up to 3 different
// peripheral functional pins. By default all pins come up as GPIO
// inputs after reset.
//
// Caution:
// Only one GPIO pin should be enabled for CANTXA/B operation.
// Only one GPIO pin shoudl be enabled for CANRXA/B operation.
// Comment out other unwanted lines.
void InitECanGpio(void)
{
InitECanaGpio();
#if (DSP28_ECANB)
InitECanbGpio();
#endif // if DSP28_ECANB
}
void InitECanaGpio(void)
{
EALLOW;
/* Enable internal pull-up for the selected CAN pins */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAPUD.bit.GPIO30 = 0; // Enable pull-up for GPIO30 (CANRXA)
// GpioCtrlRegs.GPAPUD.bit.GPIO18 = 0; // Enable pull-up for GPIO18 (CANRXA)
GpioCtrlRegs.GPAPUD.bit.GPIO31 = 0; // Enable pull-up for GPIO31 (CANTXA)
// GpioCtrlRegs.GPAPUD.bit.GPIO19 = 0; // Enable pull-up for GPIO19 (CANTXA)
/* Set qualification for selected CAN pins to asynch only */
// Inputs are synchronized to SYSCLKOUT by default.
// This will select asynch (no qualification) for the selected pins.
GpioCtrlRegs.GPAQSEL2.bit.GPIO30 = 3; // Asynch qual for GPIO30 (CANRXA)
// GpioCtrlRegs.GPAQSEL2.bit.GPIO18 = 3; // Asynch qual for GPIO18 (CANRXA)
/* Configure eCAN-A pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be eCAN functional pins.
GpioCtrlRegs.GPAMUX2.bit.GPIO30 = 1; // Configure GPIO30 for CANRXA operation
// GpioCtrlRegs.GPAMUX2.bit.GPIO18 = 3; // Configure GPIO18 for CANRXA operation
GpioCtrlRegs.GPAMUX2.bit.GPIO31 = 1; // Configure GPIO31 for CANTXA operation
// GpioCtrlRegs.GPAMUX2.bit.GPIO19 = 3; // Configure GPIO19 for CANTXA operation
EDIS;
}
#if (DSP28_ECANB)
void InitECanbGpio(void)
{
EALLOW;
/* Enable internal pull-up for the selected CAN pins */
// Pull-ups can be enabled or disabled by the user.
// This will enable the pullups for the specified pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAPUD.bit.GPIO8 = 0; // Enable pull-up for GPIO8 (CANTXB)
// GpioCtrlRegs.GPAPUD.bit.GPIO12 = 0; // Enable pull-up for GPIO12 (CANTXB)
// GpioCtrlRegs.GPAPUD.bit.GPIO16 = 0; // Enable pull-up for GPIO16 (CANTXB)
// GpioCtrlRegs.GPAPUD.bit.GPIO20 = 0; // Enable pull-up for GPIO20 (CANTXB)
GpioCtrlRegs.GPAPUD.bit.GPIO10 = 0; // Enable pull-up for GPIO10 (CANRXB)
// GpioCtrlRegs.GPAPUD.bit.GPIO13 = 0; // Enable pull-up for GPIO13 (CANRXB)
// GpioCtrlRegs.GPAPUD.bit.GPIO17 = 0; // Enable pull-up for GPIO17 (CANRXB)
// GpioCtrlRegs.GPAPUD.bit.GPIO21 = 0; // Enable pull-up for GPIO21 (CANRXB)
/* Set qualification for selected CAN pins to asynch only */
// Inputs are synchronized to SYSCLKOUT by default.
// This will select asynch (no qualification) for the selected pins.
// Comment out other unwanted lines.
GpioCtrlRegs.GPAQSEL1.bit.GPIO10 = 3; // Asynch qual for GPIO10 (CANRXB)
// GpioCtrlRegs.GPAQSEL1.bit.GPIO13 = 3; // Asynch qual for GPIO13 (CANRXB)
// GpioCtrlRegs.GPAQSEL2.bit.GPIO17 = 3; // Asynch qual for GPIO17 (CANRXB)
// GpioCtrlRegs.GPAQSEL2.bit.GPIO21 = 3; // Asynch qual for GPIO21 (CANRXB)
/* Configure eCAN-B pins using GPIO regs*/
// This specifies which of the possible GPIO pins will be eCAN functional pins.
GpioCtrlRegs.GPAMUX1.bit.GPIO8 = 2; // Configure GPIO8 for CANTXB operation
// GpioCtrlRegs.GPAMUX1.bit.GPIO12 = 2; // Configure GPIO12 for CANTXB operation
// GpioCtrlRegs.GPAMUX2.bit.GPIO16 = 2; // Configure GPIO16 for CANTXB operation
// GpioCtrlRegs.GPAMUX2.bit.GPIO20 = 3; // Configure GPIO20 for CANTXB operation
GpioCtrlRegs.GPAMUX1.bit.GPIO10 = 2; // Configure GPIO10 for CANRXB operation
// GpioCtrlRegs.GPAMUX1.bit.GPIO13 = 2; // Configure GPIO13 for CANRXB operation
// GpioCtrlRegs.GPAMUX2.bit.GPIO17 = 2; // Configure GPIO17 for CANRXB operation
// GpioCtrlRegs.GPAMUX2.bit.GPIO21 = 3; // Configure GPIO21 for CANRXB operation
EDIS;
}
#endif // if DSP28_ECANB
/*
Note: Bit timing parameters must be chosen based on the network parameters such
as the sampling point desired and the propagation delay of the network.
The propagation delay is a function of length of the cable, delay introduced by
the transceivers and opto/galvanic-isolators (if any).
The parameters used in this file must be changed taking into account the above
mentioned factors in order to arrive at the bit-timing parameters suitable
for a network.
*/
7701.DSP2833x_Examples.txt
// TI File $Revision: /main/9 $
// Checkin $Date: July 2, 2008 14:31:12 $
//###########################################################################
//
// FILE: DSP2833x_Examples.h
//
// TITLE: DSP2833x Device Definitions.
//
//###########################################################################
// $TI Release: DSP2833x/DSP2823x C/C++ Header Files V1.31 $
// $Release Date: August 4, 2009 $
//###########################################################################
#ifndef DSP2833x_EXAMPLES_H
#define DSP2833x_EXAMPLES_H
#ifdef __cplusplus
extern "C" {
#endif
/*-----------------------------------------------------------------------------
Specify the PLL control register (PLLCR) and divide select (DIVSEL) value.
-----------------------------------------------------------------------------*/
//#define DSP28_DIVSEL 0 // Enable /4 for SYSCLKOUT
//#define DSP28_DIVSEL 1 // Enable /4 for SYSCKOUT
#define DSP28_DIVSEL 2 // Enable /2 for SYSCLKOUT
//#define DSP28_DIVSEL 3 // Enable /1 for SYSCLKOUT
#define DSP28_PLLCR 10
//#define DSP28_PLLCR 9
//#define DSP28_PLLCR 8
//#define DSP28_PLLCR 7
//#define DSP28_PLLCR 6
//#define DSP28_PLLCR 5
//#define DSP28_PLLCR 4
//#define DSP28_PLLCR 3
//#define DSP28_PLLCR 2
//#define DSP28_PLLCR 1
//#define DSP28_PLLCR 0 // PLL is bypassed in this mode
//----------------------------------------------------------------------------
/*-----------------------------------------------------------------------------
Specify the clock rate of the CPU (SYSCLKOUT) in nS.
Take into account the input clock frequency and the PLL multiplier
selected in step 1.
Use one of the values provided, or define your own.
The trailing L is required tells the compiler to treat
the number as a 64-bit value.
Only one statement should be uncommented.
Example 1:150 MHz devices:
CLKIN is a 30MHz crystal.
In step 1 the user specified PLLCR = 0xA for a
150Mhz CPU clock (SYSCLKOUT = 150MHz).
In this case, the CPU_RATE will be 6.667L
Uncomment the line: #define CPU_RATE 6.667L
Example 2: 100 MHz devices:
CLKIN is a 20MHz crystal.
In step 1 the user specified PLLCR = 0xA for a
100Mhz CPU clock (SYSCLKOUT = 100MHz).
In this case, the CPU_RATE will be 10.000L
Uncomment the line: #define CPU_RATE 10.000L
-----------------------------------------------------------------------------*/
#define CPU_RATE 6.667L // for a 150MHz CPU clock speed (SYSCLKOUT)
//#define CPU_RATE 7.143L // for a 140MHz CPU clock speed (SYSCLKOUT)
//#define CPU_RATE 8.333L // for a 120MHz CPU clock speed (SYSCLKOUT)
//#define CPU_RATE 10.000L // for a 100MHz CPU clock speed (SYSCLKOUT)
//#define CPU_RATE 13.330L // for a 75MHz CPU clock speed (SYSCLKOUT)
//#define CPU_RATE 20.000L // for a 50MHz CPU clock speed (SYSCLKOUT)
//#define CPU_RATE 33.333L // for a 30MHz CPU clock speed (SYSCLKOUT)
//#define CPU_RATE 41.667L // for a 24MHz CPU clock speed (SYSCLKOUT)
//#define CPU_RATE 50.000L // for a 20MHz CPU clock speed (SYSCLKOUT)
//#define CPU_RATE 66.667L // for a 15MHz CPU clock speed (SYSCLKOUT)
//#define CPU_RATE 100.000L // for a 10MHz CPU clock speed (SYSCLKOUT)
//----------------------------------------------------------------------------
/*-----------------------------------------------------------------------------
Target device (in DSP2833x_Device.h) determines CPU frequency
(for examples) - either 150 MHz (for 28335 and 28334) or 100 MHz
(for 28332). User does not have to change anything here.
-----------------------------------------------------------------------------*/
#if DSP28_28332 // DSP28_28332 device only
#define CPU_FRQ_100MHZ 1 // 100 Mhz CPU Freq (20 MHz input freq)
#define CPU_FRQ_150MHZ 0
#else
#define CPU_FRQ_100MHZ 0 // DSP28_28335||DSP28_28334
#define CPU_FRQ_150MHZ 1 // 150 MHz CPU Freq (30 MHz input freq) by DEFAULT
#endif
//---------------------------------------------------------------------------
// Include Example Header Files:
//
#include "DSP2833x_GlobalPrototypes.h" // Prototypes for global functions within the
// .c files.
#include "DSP2833x_ePwm_defines.h" // Macros used for PWM examples.
#include "DSP2833x_Dma_defines.h" // Macros used for DMA examples.
#include "DSP2833x_I2C_defines.h" // Macros used for I2C examples.
#define PARTNO_28335 0xEF
#define PARTNO_28334 0xEE
#define PARTNO_28332 0xED
#define PARTNO_28235 0xE8
#define PARTNO_28234 0xE7
#define PARTNO_28232 0xE6
// Include files not used with DSP/BIOS
#ifndef DSP28_BIOS
#include "DSP2833x_DefaultISR.h"
#endif
// DO NOT MODIFY THIS LINE.
#define DELAY_US(A) DSP28x_usDelay(((((long double) A * 1000.0L) / (long double)CPU_RATE) - 9.0L) / 5.0L)
#ifdef __cplusplus
}
#endif /* extern "C" */
#endif // end of DSP2833x_EXAMPLES_H definition
//===========================================================================
// End of file.
//===========================================================================
Best Regards
Ali