Part Number: LAUNCHXL-F28377S
Tool/software: Code Composer Studio
Hello,
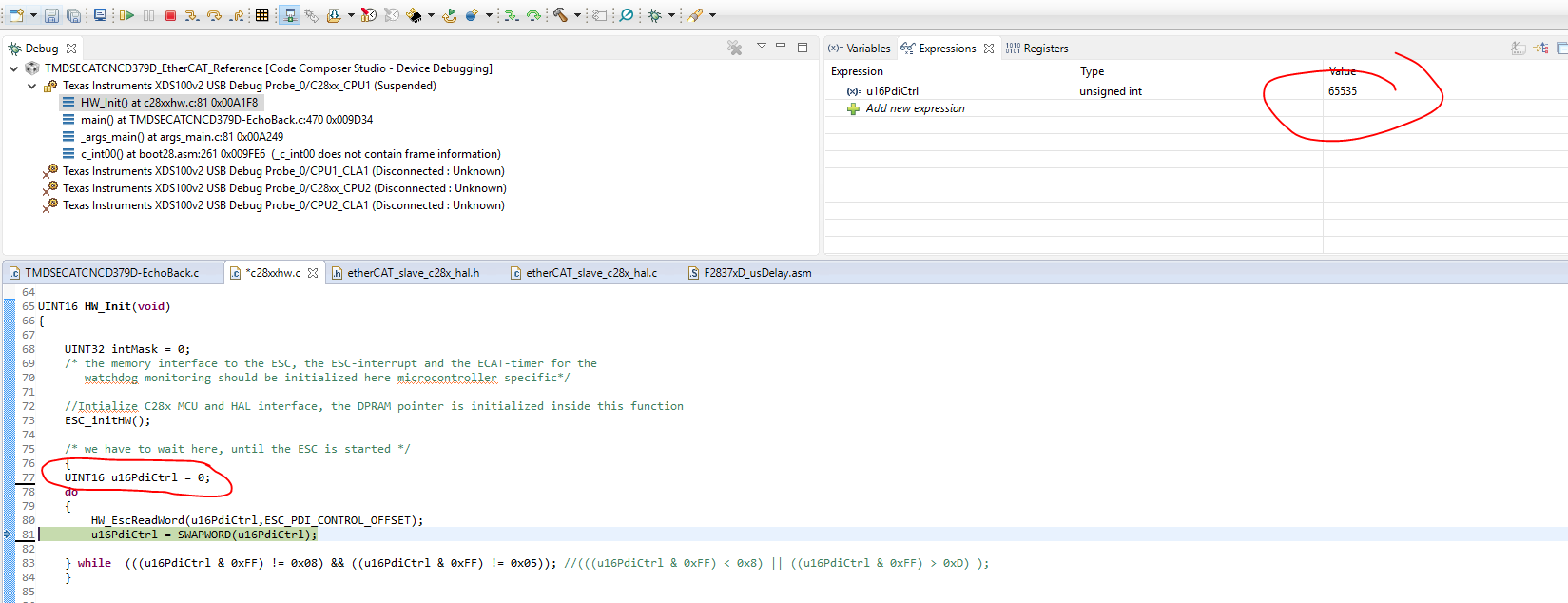
I have a several questions regarding the EtherCAT Interface for High Performance MCU Reference Design. I have LAUNCHXL-F28377S launchpad and Ethercat PiggyBack FB1111-0141(SPI) connected together similarly as described in tidubq6.pdf, page 5, figure 6. The thin is that neither my single core launchpad (LAUNCHXL-F28377S) nor the dual core launchpad(LAUNCHXL-F28379d) of the tidubq6.pdf, output the spedified GPIOs for SPI_IRQ and EEPROM_LOADED pins. After searching thoroughly the provided ccs project for the example, I found (correct me if i am wrong) that GPIO78(instead of GPIO136) is chosen to be connected with SPI_IRQ pin. As far as the EEPROM_LOADED pin is concered, i didnt find anything yet. Could you help me with this matter?
- I am using SPI communication mode.
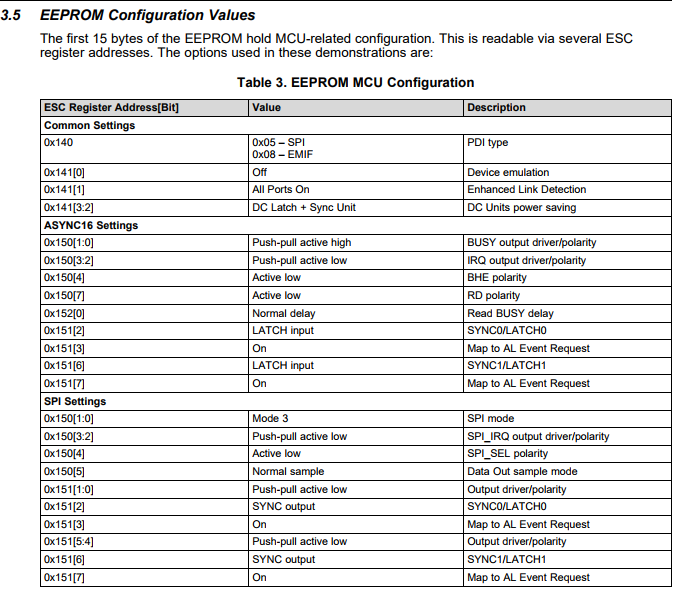
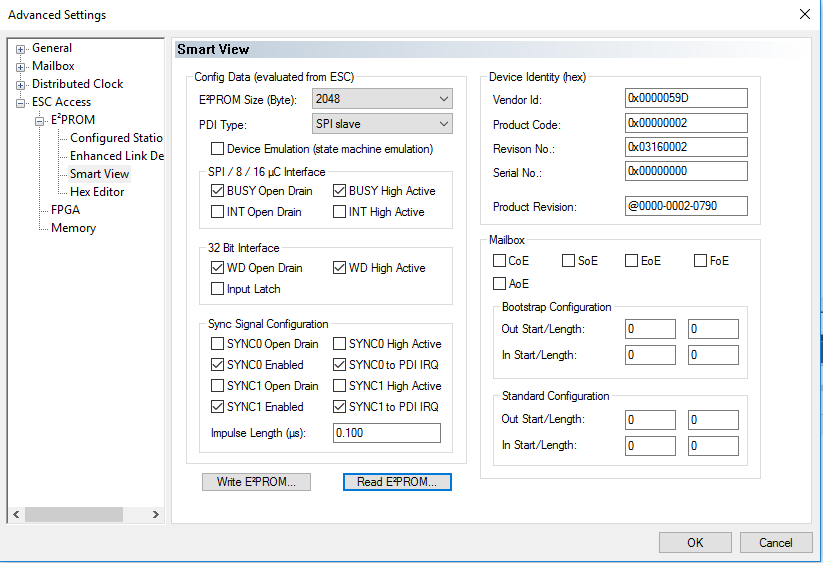
I also followed instruction concerning TwinCAT3, but when I finally programmed EEPROM(to program EEPROM I used pdi_test_app_spi.bin included in tidcc35.zip downloaded from reference design page. First i wrote EEPROM with the file and then i Read EEPROM ), I faced 2 problems. The first one is that if i close the smartView window and open it again, then it seems to be at the initial state and i dont know if i haven done anything wrong. the second problem is that whatever i try, the Ethercat PiggyBack FB1111-0141 doesn't switch to OPERATING state. What am i doing wrong? SmartView tab after writing EEPROM with the supplied bin (spi) file and then Read EEPROM (saving it) is the provided.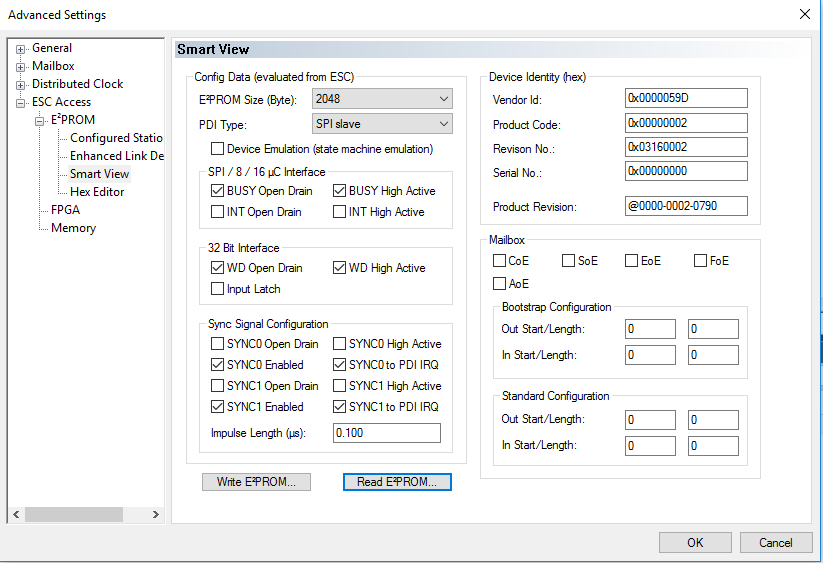
Do i need to switch into run mode of TWINCAT before running the ccs project??
Thank you,
Stamatis Athiniotis