Other Parts Discussed in Thread: LAUNCHXL-F28379D, , CONTROLSUITE, TMDSECATCNCD379D, TMDSICE3359
Hello,
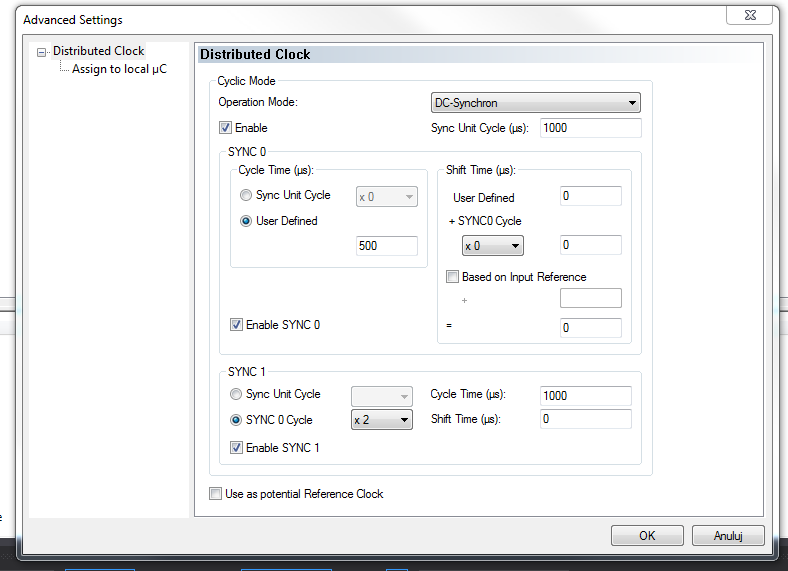
I successfully ran TIDM-DELFINO-ETHERCAT connected to LaunchXL-F28379D. I have an access to ETG so I could prepare stack files, assign Vendor ID and connect to TwinCAT 3. And it runs in Free Run cycle. And here is my issue - free run cycle works with 4ms cycle. I have to decrease this time to about 100 us. I think that Distributed Clock (DC) is necessary here but I have no idea how to setup it correctly. Every single change in TwinCAT related to DC mode breaks transmission.
My question - how should I turn Distributed Clock on? In my SSC files DC_SUPPORTED and AL_EVENT_ENABLED are set to 1 so it is possible to use DC mode I presume.
BR,
Dawid.