Other Parts Discussed in Thread: C2000WARE
Tool/software: TI C/C++ Compiler
Hello All,
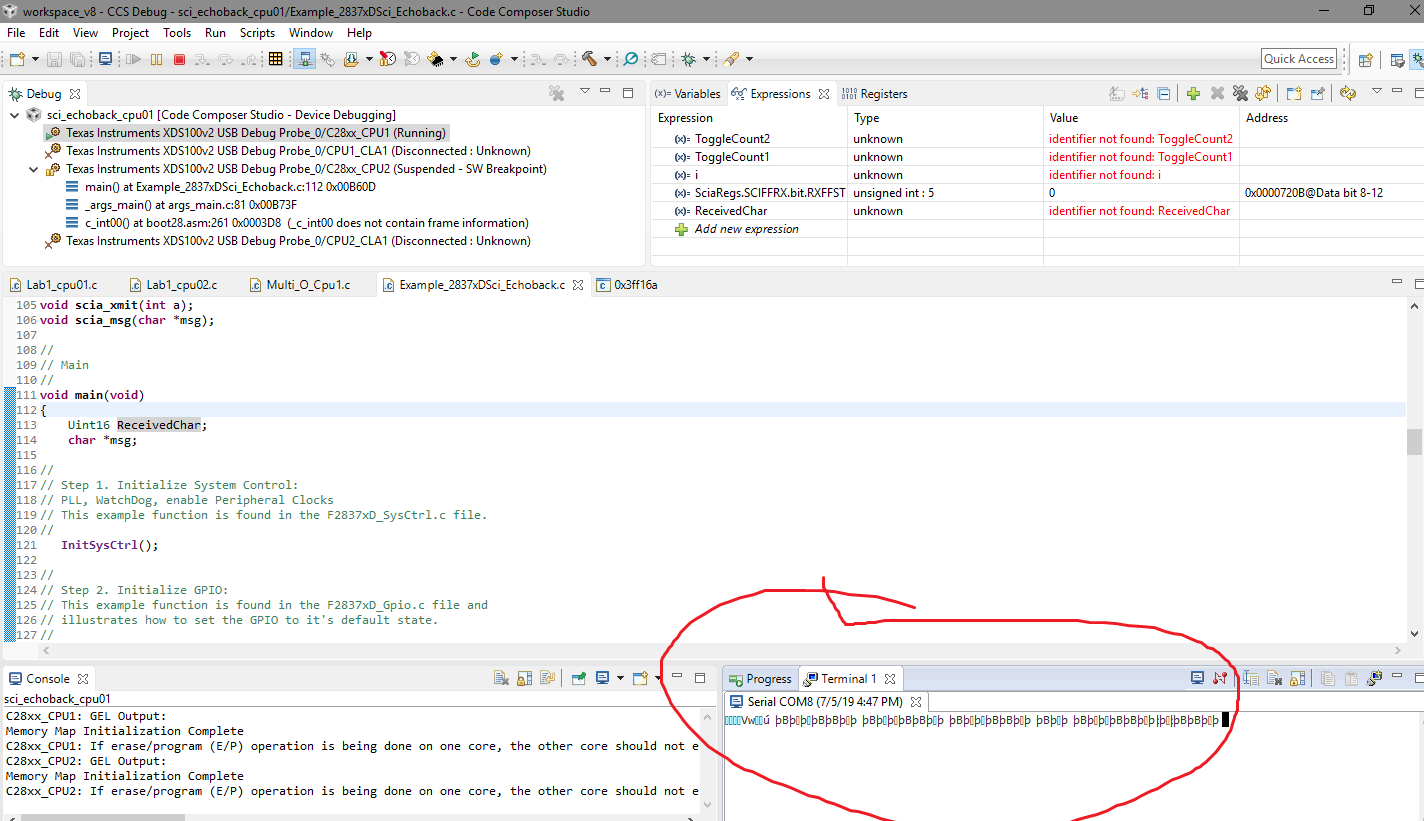
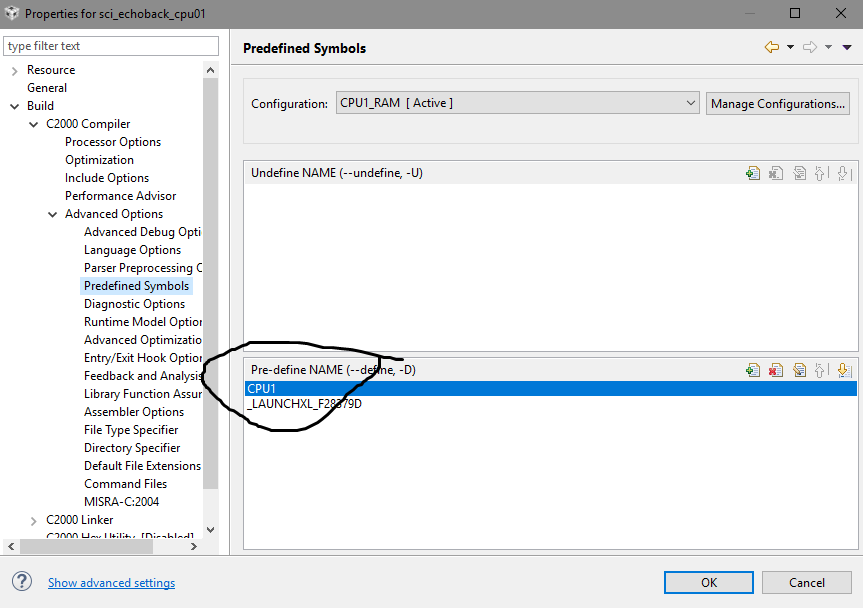
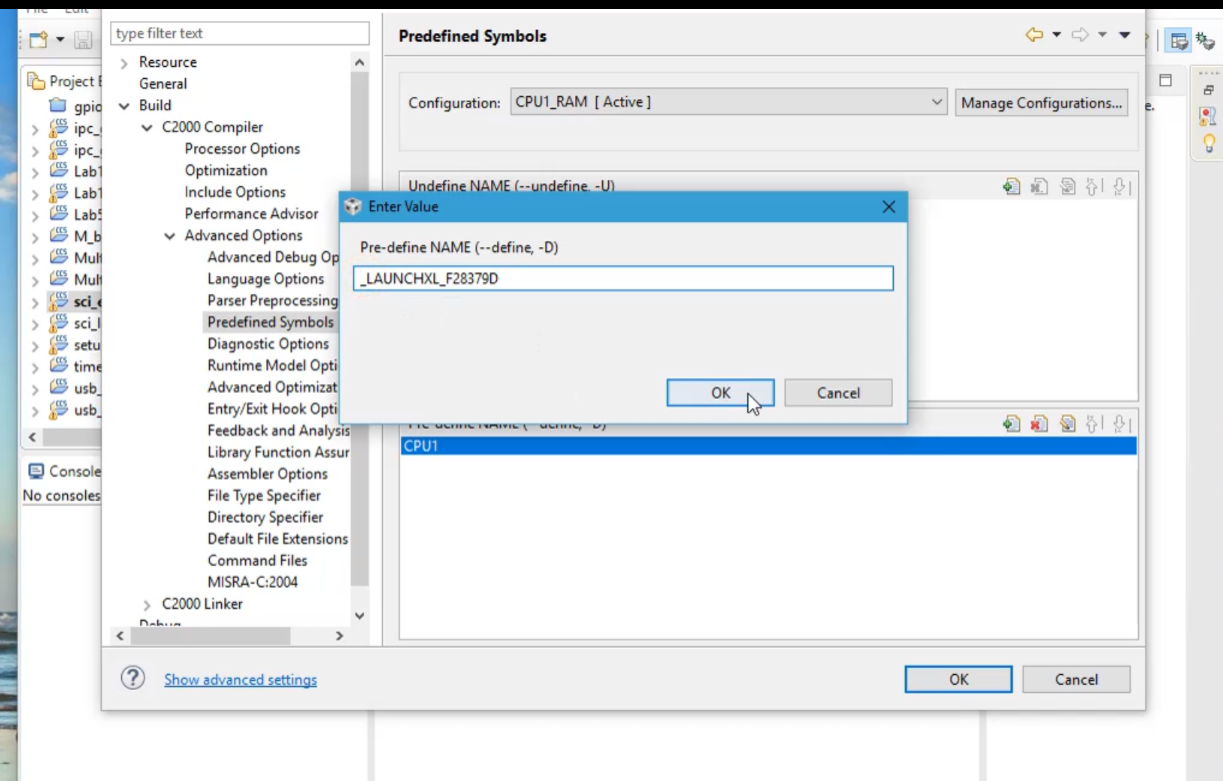
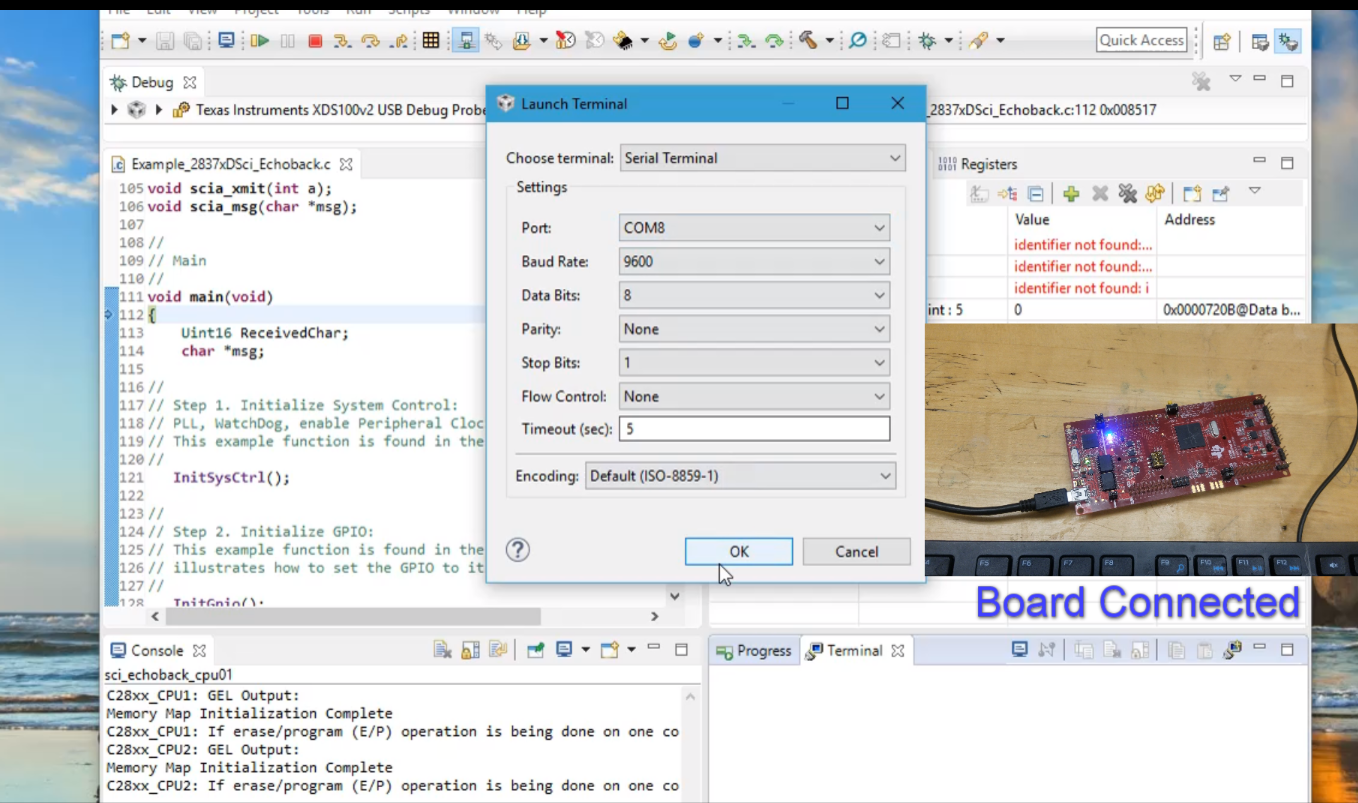
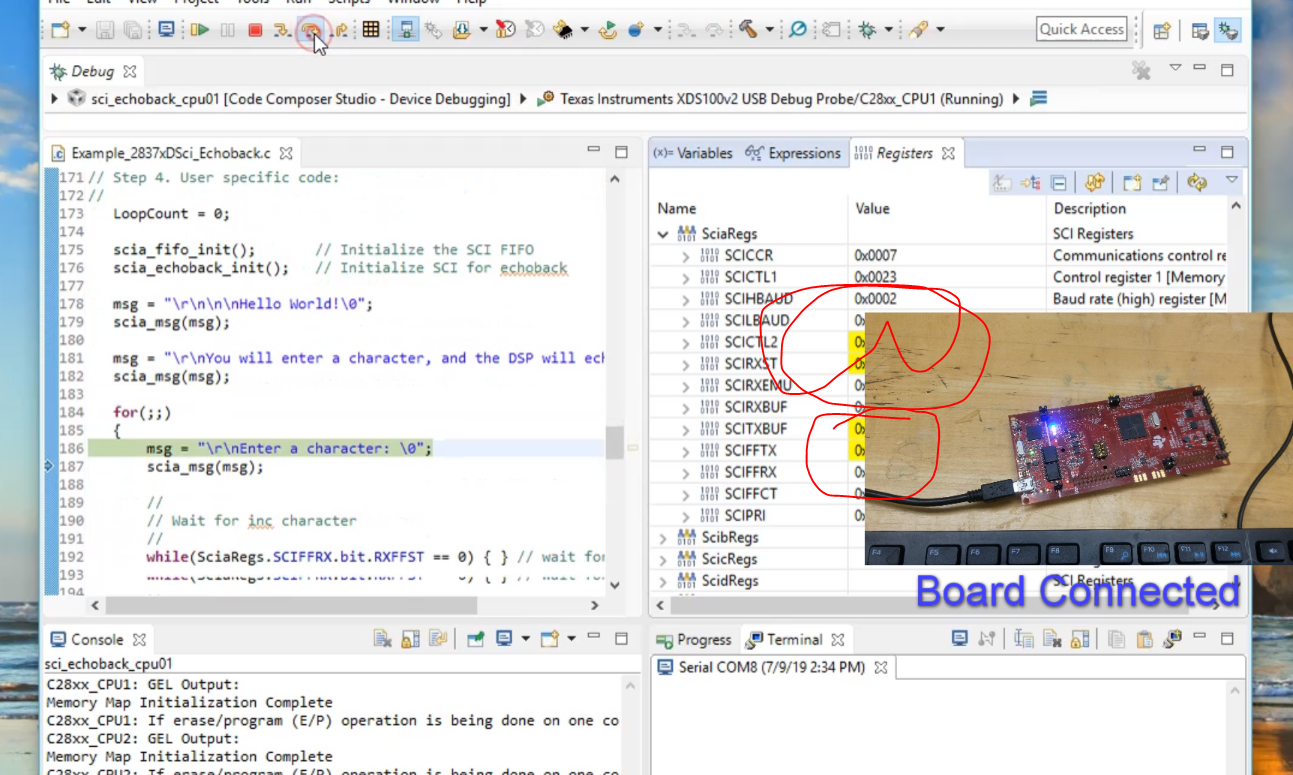
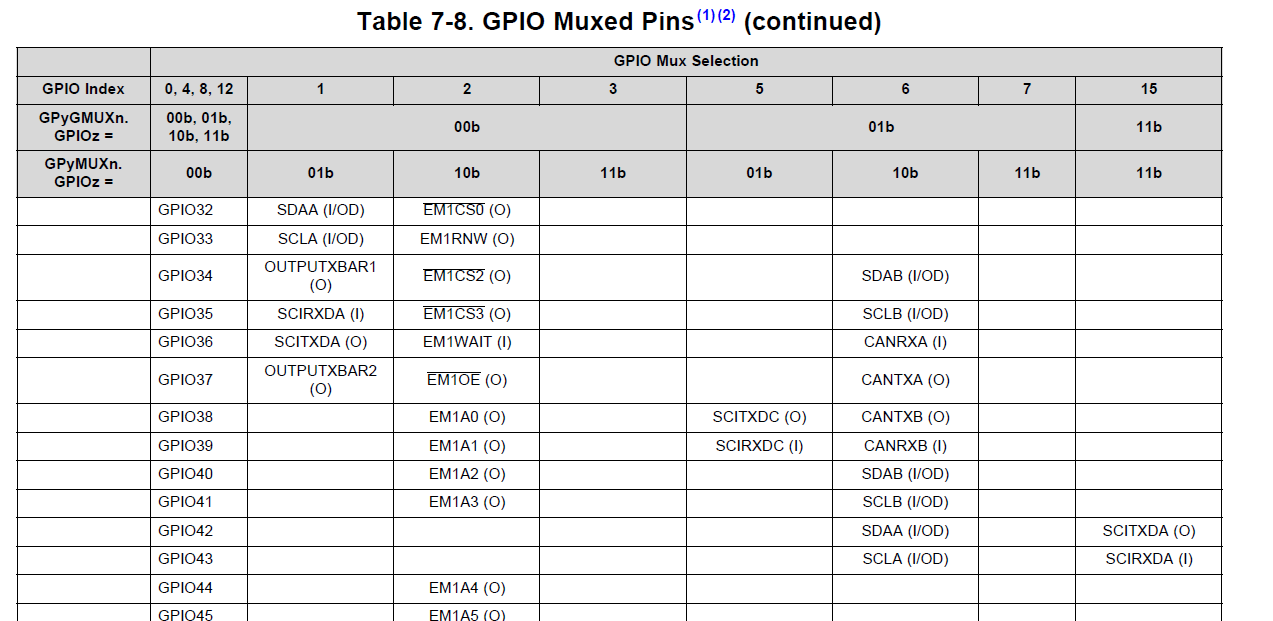
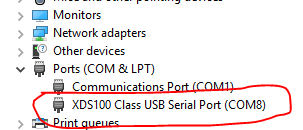
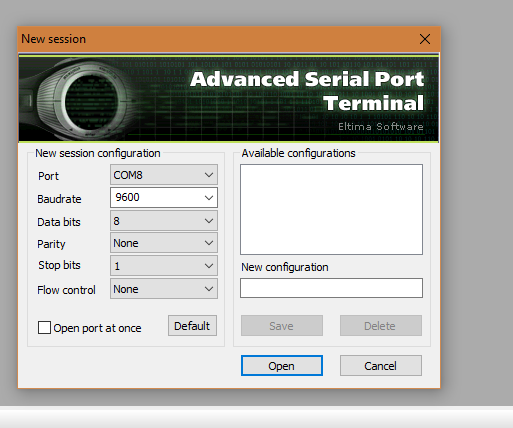
I am trying the Sci echo-back example on the LAUNCHXL-F28379D. I built the program and started the debug session. I opened the serial port according to the description
-
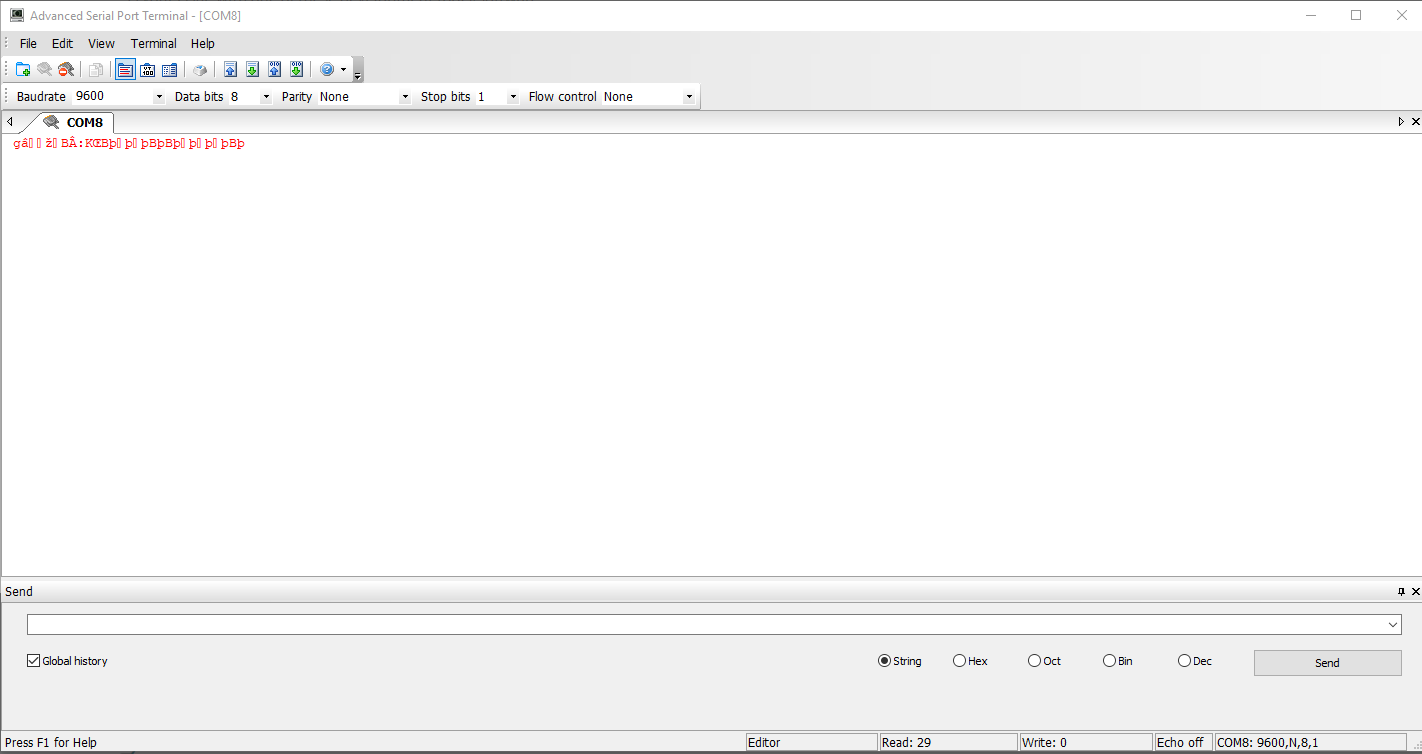
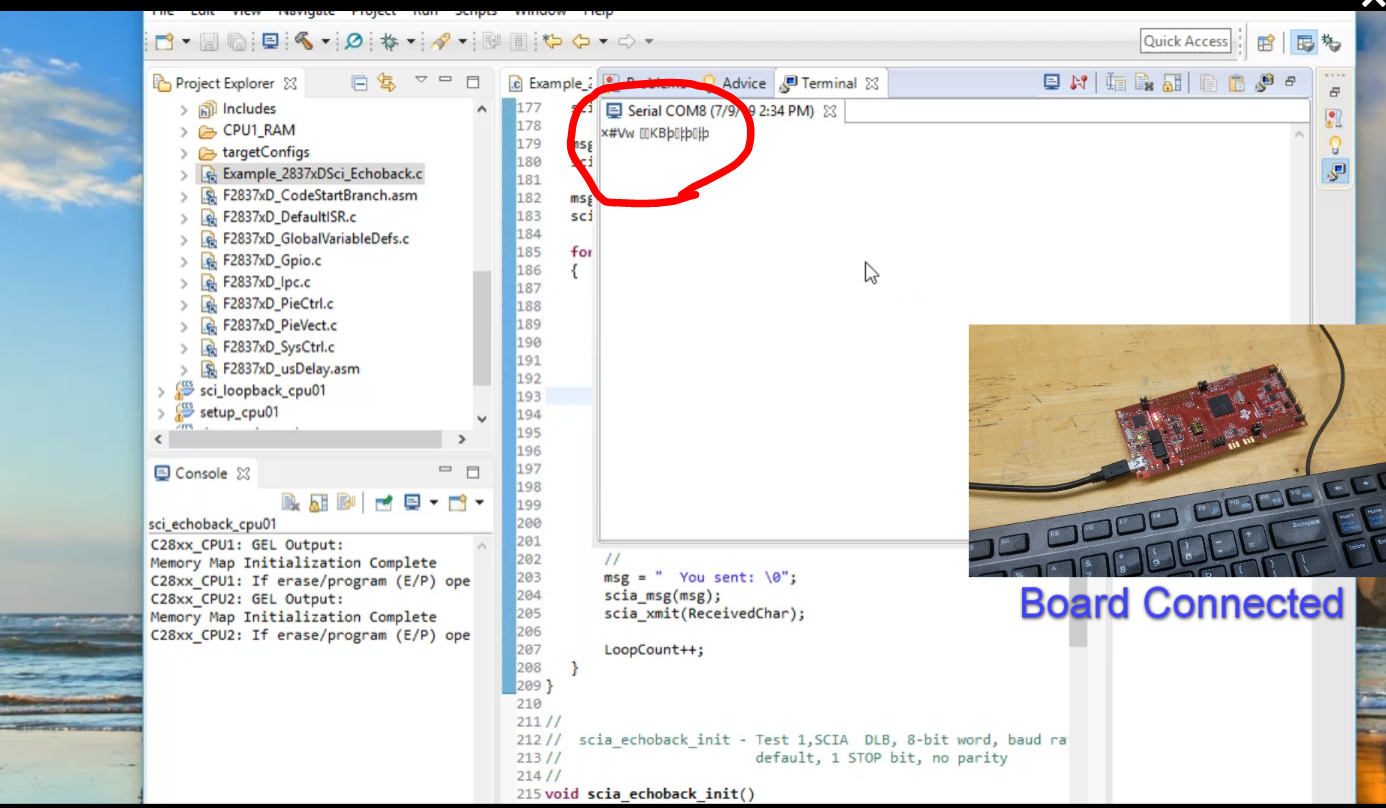
But I am getting this junk values.
I would really appreciate help solving this issue.
Thank you.