Other Parts Discussed in Thread: BOOSTXL-DRV8320RS
Hi,
I am using LAUNCHXL-F280049C with BOOSTXL-DRV8320RS to implement and test InstaSPIN FOC. I have few doubts regarding the InstaSPIN-FOC Lab Guide.
- For PMSM motors, does InstaSPIN-FOC identifies motor intertia like InstaSPIN-MOTION?
- In the InstaSPIN-FOC Lab guide, in the Lab 06 for Kp and Ki tuning for current controller.
- For the Ki gain calculation:
- Based on the equation mentioned in the lab guide, it is required to calculate Ki gain per unit base.
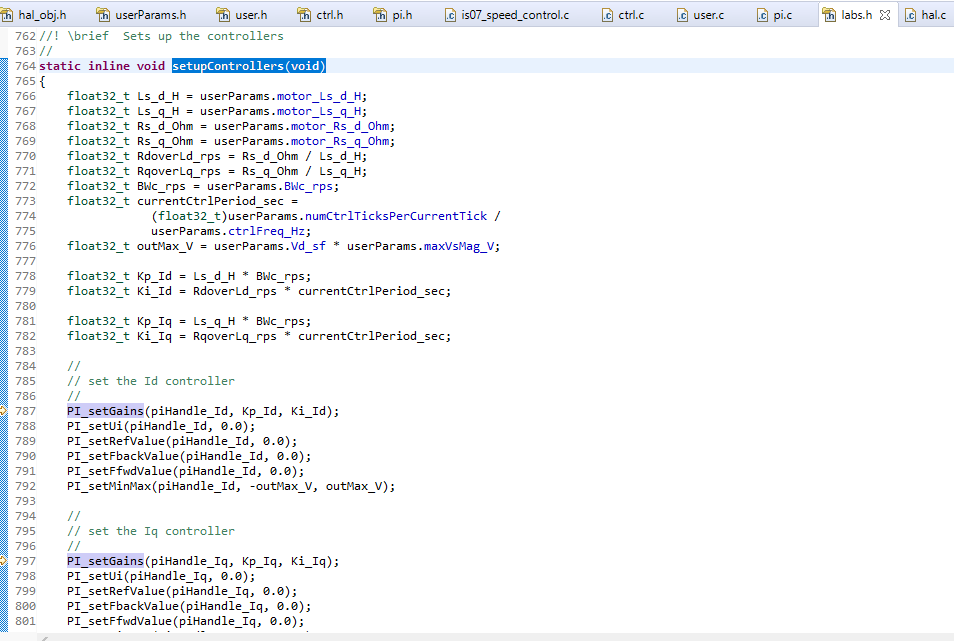
- This calculation is similar to the calculation in the code in the function setupControllers(void) in "Labs.h" file which sets the controller and results similar results.
- For the Kp gain calculation:
- Lab guide suggests to calculate and use Kp gain per unit base as well.
- However, in the function setupControllers(void) in "Labs.h" file, the code doesn't use per unit calculation as mentioned in the Lab.
- For the Ki gain calculation:
Could you please explain this discrepancy between the Lab guide and the Lab Code? Am I missing something here in the calculation?
Best,
Amit