


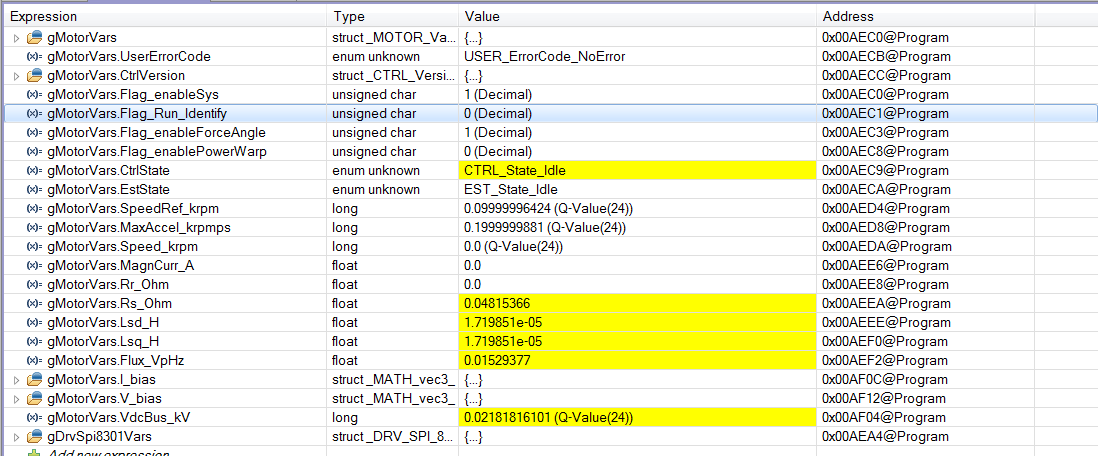
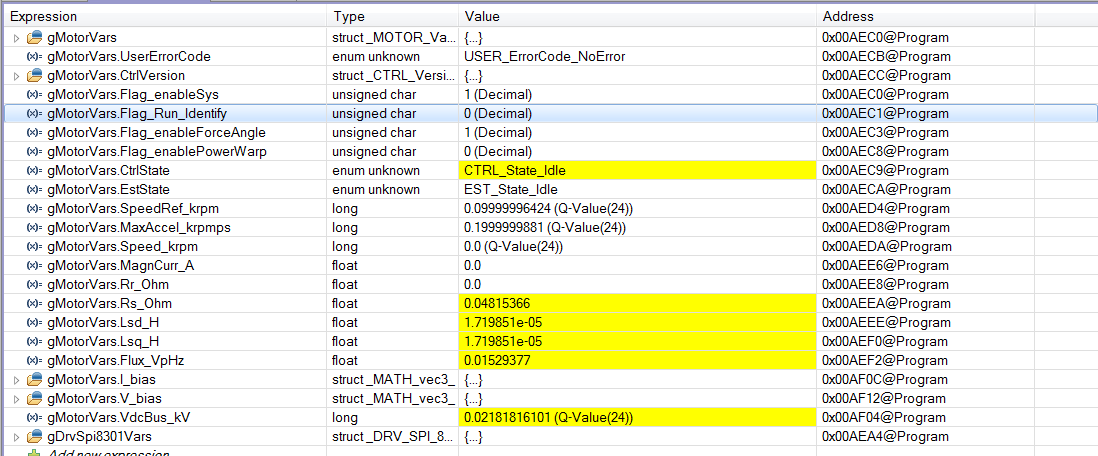
OK, Chris do you know if Tim VanderMey ever got the JM1 motor running? I am in the InstaSPIN lab2c process and have used the information above, and the spreadsheet. After I have loaded the software and enter into the debug phase, The software will not allow me to set the "gMotorVars.Flag_enableSys" variable to 1. Here is the abbreviated user.h information:
// KJK 5/18/2015 begin Joby testing
// Original Flux values from BK Precision 878B Inductance meter
#elif (USER_MOTOR == My_Motor)
#define USER_MOTOR_TYPE MOTOR_Type_Pm
#define USER_MOTOR_NUM_POLE_PAIRS (11)
#define USER_MOTOR_Rr (NULL)
#define USER_MOTOR_Rs (0.4)
#define USER_MOTOR_Ls_d (21.5e-06)
#define USER_MOTOR_Ls_q (21.5e-06)
#define USER_MOTOR_RATED_FLUX (0.064)
#define USER_MOTOR_MAGNETIZING_CURRENT (NULL)
#define USER_MOTOR_RES_EST_CURRENT (3.0)
#define USER_MOTOR_IND_EST_CURRENT (-3.0)
#define USER_MOTOR_MAX_CURRENT (40.0)
#define USER_MOTOR_FLUX_EST_FREQ_Hz (110.0)
// Original CClearman calculation from E2E
//8.1 KRPM / 90 V * sqrt(3) = 1 / flux
// Flux = 0.064 V/Hz
// www.jobymotors.com/.../products.php
// for 55volts it's 145kV from Joby website
// (14500/55)*1.73 = 1/flux
// flux = 0.002192
However since the DRV8301-69 Kit is only rated to 60V, 40Amps, I set the power supply to 55 Volts for starters
and the USER_MOTOR_MAX_CURRENT to 40.0 amps. Can you point me in the right direction for my next step?
Thanks,
Kurt



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}