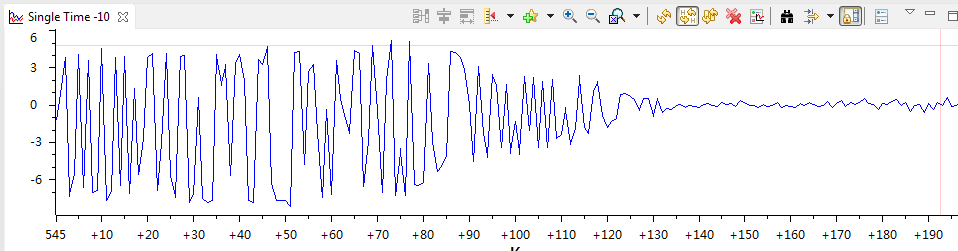
When I test my ACIM motor by using lab13e, the motor working at maximum speed ,and I Increasing load , normally the phase voltage will reached 15V which is the effective value of rated voltage .The Vector sum of α current and β current close to 1(PU) , but the phase voltage still can not reached 15V. Let's see the pictures.