Part Number: MSP430-ADC10
Hi everyone !
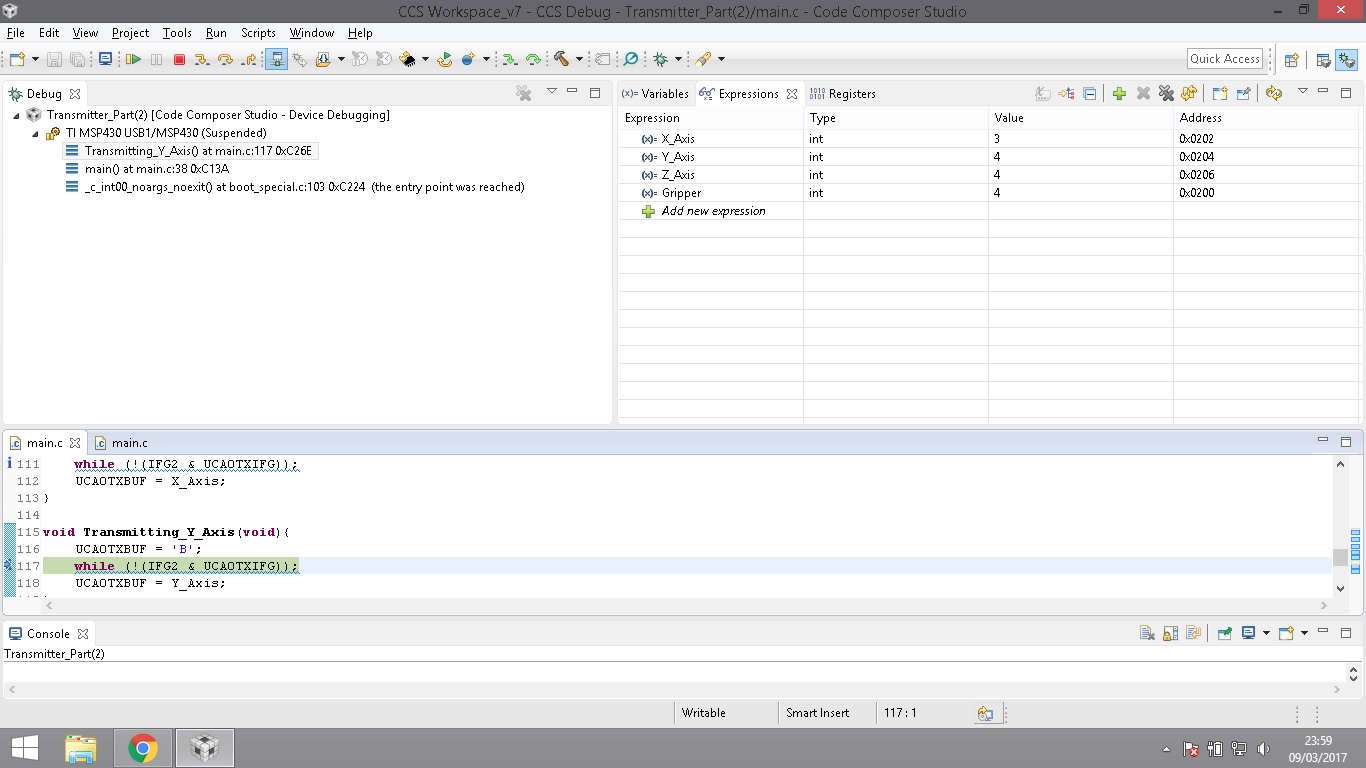
This is my first issue on the forum. I am facing a problem on my robotic project with MSP430. So, i want to read ADC values from multiple pins on MSP. When i chose PIN0 for starting pin with PIN1, PIN2, PIN3, everything is okay, reading is okay, values are okay. Besides that i want to transfer these data with bluetooth module so i cannot use PIN1 and PIN2(PIN1 and PIN2 is reserved for UART communication). So, i modified the pin configurations and necessary register change and chose PIN0, PIN3, PIN4, PIN5 to read the ADC values but the code which is working before, didn't work. I am sharing the code below, if you faced this type of problem, please contact me. Thank you for your attention.
Best Regards