Other Parts Discussed in Thread: SN65HVD233-HT, SN74LVC4245A, SN74LV244A
I am working on CAN bus.
I am using simple_tx and simple_rx code given in example folder (peripheral-CAN).
I have modified that code since I don't want to use UART and made code simple.
I have followed this thread: 
But this doesn't work for me.
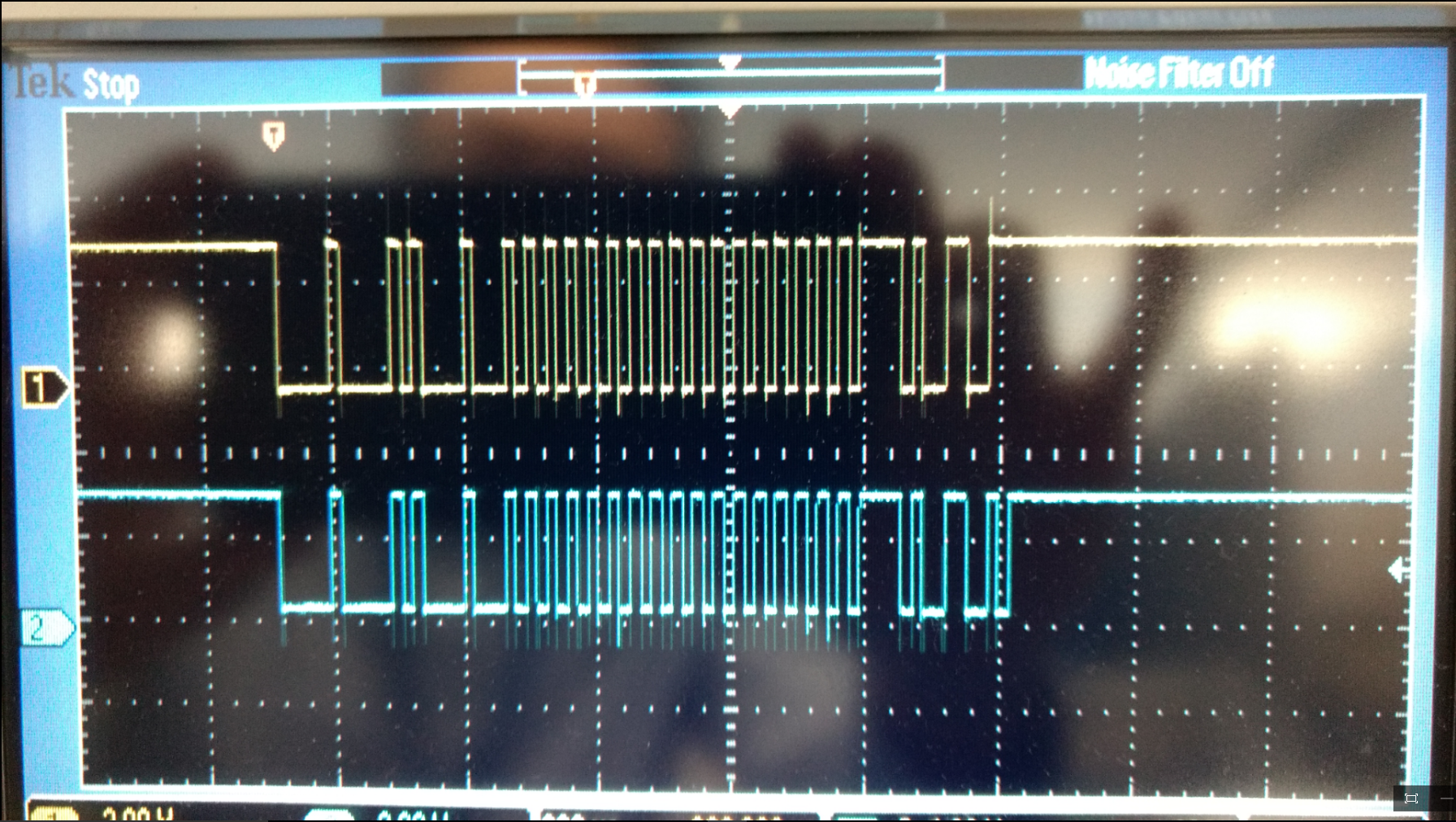
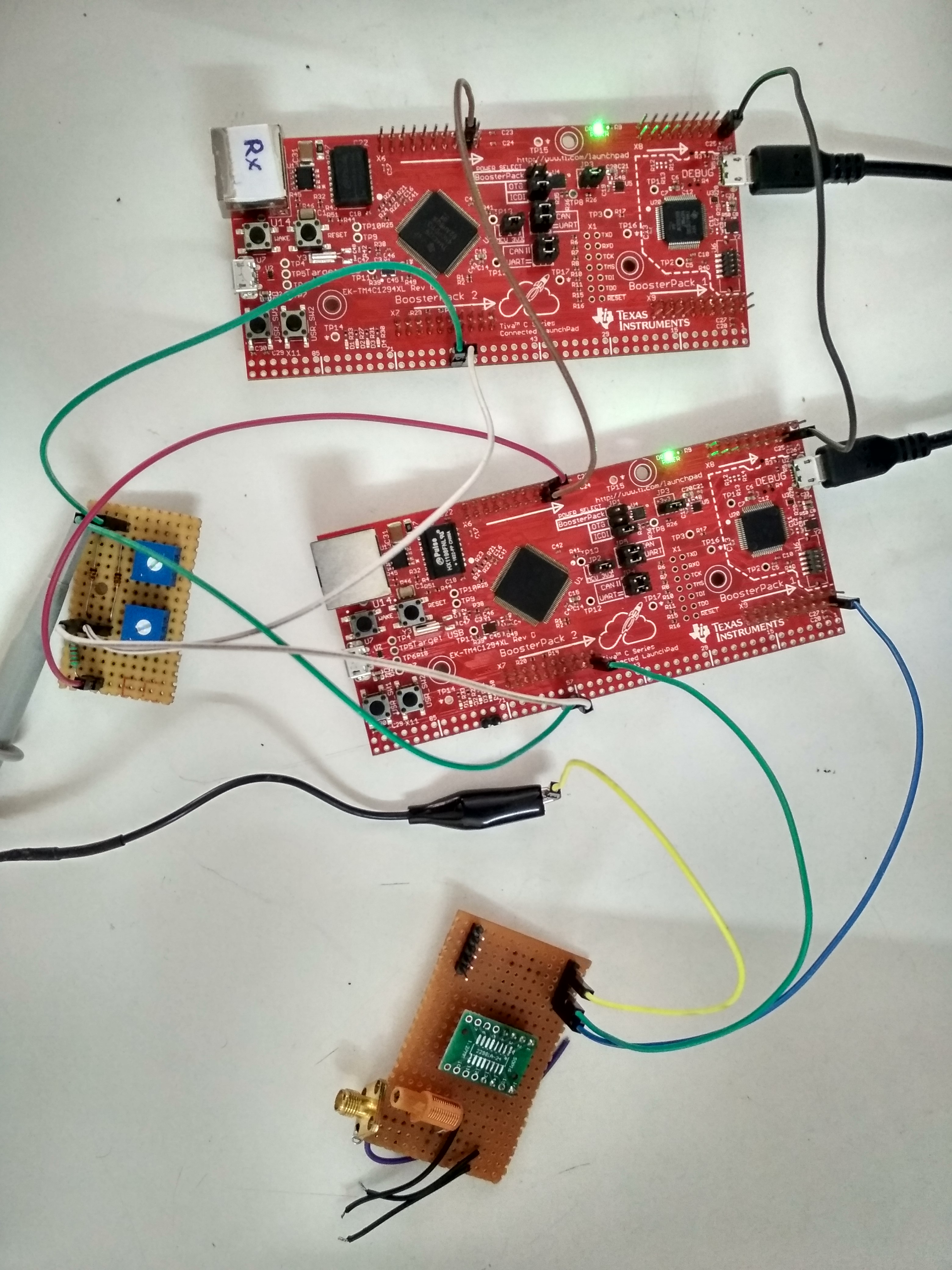
Different hardware connections and corresponding output waveform, I have attached in following document. Please see that.
and the hardware connection :
All jumpers are in default position.
//////////////////////////////// SIMPLE_TX CODE
#include <stdbool.h>
#include <stdint.h>
#include "inc/hw_can.h"
#include "inc/hw_ints.h"
#include "inc/hw_memmap.h"
#include "driverlib/can.h"
#include "driverlib/gpio.h"
#include "driverlib/interrupt.h"
#include "driverlib/pin_map.h"
#include "driverlib/sysctl.h"
#include "driverlib/uart.h"
#include "utils/uartstdio.h"
volatile uint32_t g_ui32MsgCount = 0;
unsigned int sysClock;
volatile bool g_bErrFlag = 0;
void InitConsole(void)
{
SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOD); // enable UART0 GPIO peripheral
GPIOPinConfigure(GPIO_PD4_U2RX);
GPIOPinConfigure(GPIO_PD5_U2TX);
SysCtlPeripheralEnable(SYSCTL_PERIPH_UART2);
UARTClockSourceSet(UART2_BASE, UART_CLOCK_PIOSC);
GPIOPinTypeUART(GPIO_PORTD_BASE, GPIO_PIN_4 | GPIO_PIN_5);
//UARTStdioConfig(0, 115200, sysClock);
}
void SimpleDelay(void)
{
SysCtlDelay(40000000);
}
void CANIntHandler(void)
{
uint32_t ui32Status;
ui32Status = CANIntStatus(CAN1_BASE, CAN_INT_STS_CAUSE);
if(ui32Status == CAN_INT_INTID_STATUS)
{
ui32Status = CANStatusGet(CAN1_BASE, CAN_STS_CONTROL);
g_bErrFlag = 1;
}
else if(ui32Status == 1)
{
CANIntClear(CAN1_BASE, 1);
g_ui32MsgCount++;
g_bErrFlag = 0;
}
else
{
}
}
int main(void)
{
tCANMsgObject sCANMessage;
uint32_t ui32MsgData=0;
uint8_t *pui8MsgData;
pui8MsgData = (uint8_t *)&ui32MsgData;
sysClock = SysCtlClockFreqSet((SYSCTL_XTAL_25MHZ | SYSCTL_OSC_MAIN | SYSCTL_USE_PLL | SYSCTL_CFG_VCO_480), 120000000);SimpleDelay();
//InitConsole();
SysCtlPeripheralEnable(SYSCTL_PERIPH_GPION);
GPIOPinTypeGPIOOutput(GPIO_PORTN_BASE, GPIO_PIN_0|GPIO_PIN_1);
SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOB);SimpleDelay();
GPIOPinConfigure(GPIO_PB0_CAN1RX);
GPIOPinConfigure(GPIO_PB1_CAN1TX);
GPIOPinTypeCAN(GPIO_PORTB_BASE, GPIO_PIN_0 | GPIO_PIN_1);
SysCtlPeripheralEnable(SYSCTL_PERIPH_CAN1);
CANInit(CAN1_BASE);SimpleDelay();
CANBitRateSet(CAN1_BASE, SysCtlClockGet(), 500000);SimpleDelay();
CANIntRegister(CAN1_BASE, CANIntHandler); SimpleDelay();
CANIntEnable(CAN1_BASE, CAN_INT_MASTER | CAN_INT_ERROR | CAN_INT_STATUS);SimpleDelay();
IntEnable(INT_CAN1);SimpleDelay();
CANEnable(CAN1_BASE);SimpleDelay();
ui32MsgData = 0xAA;
sCANMessage.ui32MsgID = 1;
sCANMessage.ui32MsgIDMask = 0;
sCANMessage.ui32Flags = MSG_OBJ_TX_INT_ENABLE;
sCANMessage.ui32MsgLen = sizeof(pui8MsgData);
sCANMessage.pui8MsgData = pui8MsgData;
while(1)
{
//UARTprintf("Sending msg: 0x%02X %02X %02X %02X",pui8MsgData[0], pui8MsgData[1], pui8MsgData[2],pui8MsgData[3]);
GPIOPinWrite(GPIO_PORTN_BASE, GPIO_PIN_0|GPIO_PIN_1, 0x02);
CANMessageSet(CAN1_BASE, 1, &sCANMessage, MSG_OBJ_TYPE_TX);SimpleDelay();
GPIOPinWrite(GPIO_PORTN_BASE, GPIO_PIN_0|GPIO_PIN_1, 0x08);SimpleDelay();
if(g_bErrFlag)
{
//UARTprintf(" error - cable connected?\n");
}
else
{
//UARTprintf(" total count = %u\n", g_ui32MsgCount);
}
/*ui32MsgData++;
if(ui32MsgData>=0x65)
{
ui32MsgData = 0x55;
}*/
while(1)
{
}
}
return(0);
}
///////////////////////////////////////////////// SIMPLE_TX CODE END
///////////////////////////////////////////////// SIMPLE_RX CODE
#include <stdbool.h>
#include <stdint.h>
#include "inc/hw_can.h"
#include "inc/hw_ints.h"
#include "inc/hw_memmap.h"
#include "inc/hw_types.h"
#include "driverlib/can.h"
#include "driverlib/gpio.h"
#include "driverlib/interrupt.h"
#include "driverlib/pin_map.h"
#include "driverlib/sysctl.h"
#include "driverlib/uart.h"
#include "utils/uartstdio.h"
unsigned int sysClock;
volatile uint32_t g_ui32MsgCount = 0;
volatile bool g_bRXFlag = 0;
volatile bool g_bErrFlag = 0;
void SimpleDelay(void)
{
SysCtlDelay(20000000);
}
//*****************************************************************************
void InitConsole(void)
{
SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOD); // enable UART0 GPIO peripheral
GPIOPinConfigure(GPIO_PD4_U2RX);
GPIOPinConfigure(GPIO_PD5_U2TX);
SysCtlPeripheralEnable(SYSCTL_PERIPH_UART2);
UARTClockSourceSet(UART2_BASE, UART_CLOCK_PIOSC);
GPIOPinTypeUART(GPIO_PORTD_BASE, GPIO_PIN_4 | GPIO_PIN_5);
//UARTStdioConfig(0, 115200, sysClock);
}
void
CANIntHandler(void)
{
uint32_t ui32Status;
ui32Status = CANIntStatus(CAN1_BASE, CAN_INT_STS_CAUSE);
if(ui32Status == CAN_INT_INTID_STATUS)
{
ui32Status = CANStatusGet(CAN1_BASE, CAN_STS_CONTROL);
g_bErrFlag = 1;
}
else if(ui32Status == 1)
{
CANIntClear(CAN1_BASE, 1);
g_ui32MsgCount++;
g_bRXFlag = 1;
g_bErrFlag = 0;
}
else
{
}
}
int main(void)
{
tCANMsgObject sCANMessage;
uint8_t pui8MsgData[8];
sysClock = SysCtlClockFreqSet((SYSCTL_XTAL_25MHZ | SYSCTL_OSC_MAIN | SYSCTL_USE_PLL | SYSCTL_CFG_VCO_480), 120000000);
//InitConsole();
SysCtlPeripheralEnable(SYSCTL_PERIPH_GPION);
GPIOPinTypeGPIOOutput(GPIO_PORTN_BASE, GPIO_PIN_0|GPIO_PIN_1);
SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOB);
GPIOPinConfigure(GPIO_PB0_CAN1RX);
GPIOPinConfigure(GPIO_PB1_CAN1TX);
GPIOPinTypeCAN(GPIO_PORTB_BASE, GPIO_PIN_0 | GPIO_PIN_1);
SysCtlPeripheralEnable(SYSCTL_PERIPH_CAN1);SimpleDelay();
CANInit(CAN1_BASE);SimpleDelay();
CANBitRateSet(CAN1_BASE, SysCtlClockGet(), 500000);SimpleDelay();
CANIntRegister(CAN1_BASE, CANIntHandler); SimpleDelay();
CANIntEnable(CAN1_BASE, CAN_INT_MASTER | CAN_INT_ERROR | CAN_INT_STATUS);SimpleDelay();
IntEnable(INT_CAN1);SimpleDelay();
CANEnable(CAN1_BASE);SimpleDelay();
sCANMessage.ui32MsgIDMask = 0;
sCANMessage.ui32Flags = MSG_OBJ_RX_INT_ENABLE | MSG_OBJ_USE_ID_FILTER;
sCANMessage.ui32MsgLen = 8;
CANMessageSet(CAN1_BASE, 1, &sCANMessage, MSG_OBJ_TYPE_RX);
for(;;)
{
unsigned int uIdx;
if(g_bRXFlag)
{
GPIOPinWrite(GPIO_PORTN_BASE, GPIO_PIN_0|GPIO_PIN_1, 0x08);
SimpleDelay();
GPIOPinWrite(GPIO_PORTN_BASE, GPIO_PIN_0|GPIO_PIN_1, 0x02);
sCANMessage.pui8MsgData = pui8MsgData;
CANMessageGet(CAN1_BASE, 1, &sCANMessage, 0);
g_bRXFlag = 0;
if(sCANMessage.ui32Flags & MSG_OBJ_DATA_LOST)
{
//UARTprintf("CAN message loss detected\n");
}
//UARTprintf("Msg ID=0x%08X len=%u data=0x",sCANMessage.ui32MsgID, sCANMessage.ui32MsgLen);
for(uIdx = 0; uIdx < sCANMessage.ui32MsgLen; uIdx++)
{
//UARTprintf("%02X ", pui8MsgData[uIdx]);
if(pui8MsgData[uIdx]==0xAA)
{
GPIOPinWrite(GPIO_PORTN_BASE, GPIO_PIN_0|GPIO_PIN_1, 0x02);SimpleDelay();
GPIOPinWrite(GPIO_PORTN_BASE, GPIO_PIN_0|GPIO_PIN_1, 0x08);SimpleDelay();
GPIOPinWrite(GPIO_PORTN_BASE, GPIO_PIN_0|GPIO_PIN_1, 0x02);SimpleDelay();
GPIOPinWrite(GPIO_PORTN_BASE, GPIO_PIN_0|GPIO_PIN_1, 0x08);SimpleDelay();
GPIOPinWrite(GPIO_PORTN_BASE, GPIO_PIN_0|GPIO_PIN_1, 0x02);SimpleDelay();
GPIOPinWrite(GPIO_PORTN_BASE, GPIO_PIN_0|GPIO_PIN_1, 0x08);SimpleDelay();
GPIOPinWrite(GPIO_PORTN_BASE, GPIO_PIN_0|GPIO_PIN_1, 0x02);SimpleDelay();
GPIOPinWrite(GPIO_PORTN_BASE, GPIO_PIN_0|GPIO_PIN_1, 0x08);SimpleDelay();
}
}
//UARTprintf("total count=%u\n", g_ui32MsgCount);
}
}
return(0);
}
///////////////////////////////////////////////// SIMPLE_RX CODE END
I think I have done some mistake in hardware or in code. I am not able to debug that.
Amit suggested SN65HVD233-HT 3.3-V CAN Transceiver. 
Is it issue of MCP2551 CAN Transceiver because of voltage levels(TTL)..???
I have tried LVTTL to TTL convertor and TTL to LVTTL convertor , SN74LV244A and SN74LVC4245A. Still getting same error.
Regards,
Krishnat