Other Parts Discussed in Thread: DRV8305, CSD88599Q5DC, MOTORWARE
Tool/software: Code Composer Studio
Hello everyone, I am again with a question on DRV8323.
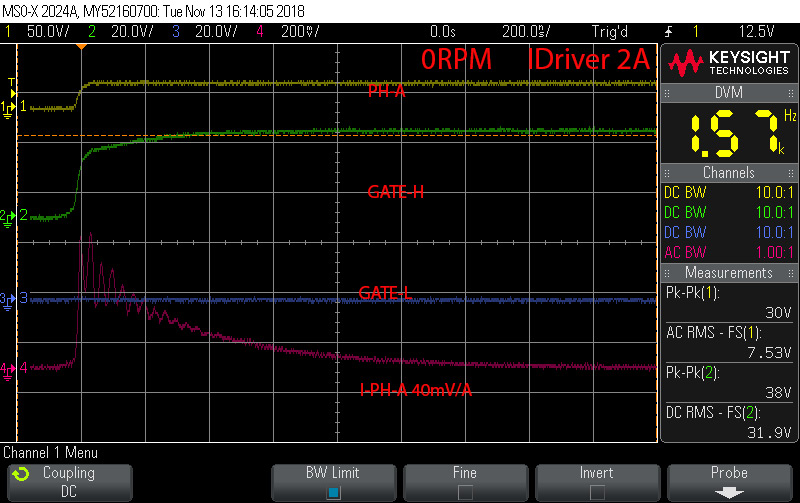
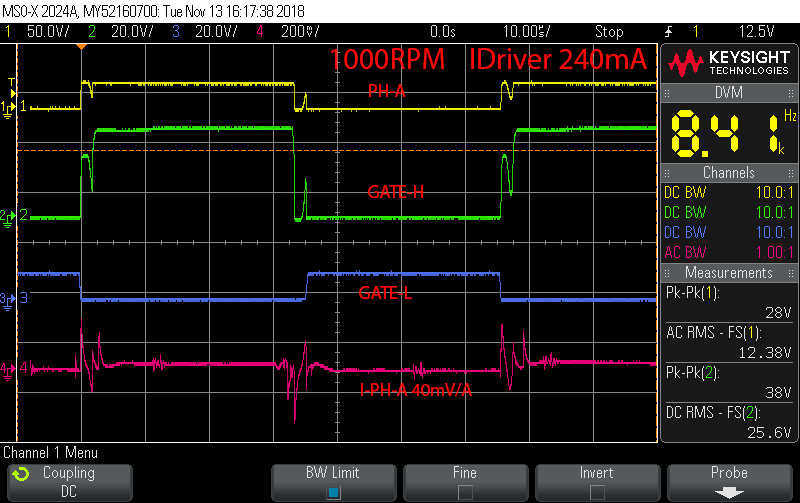
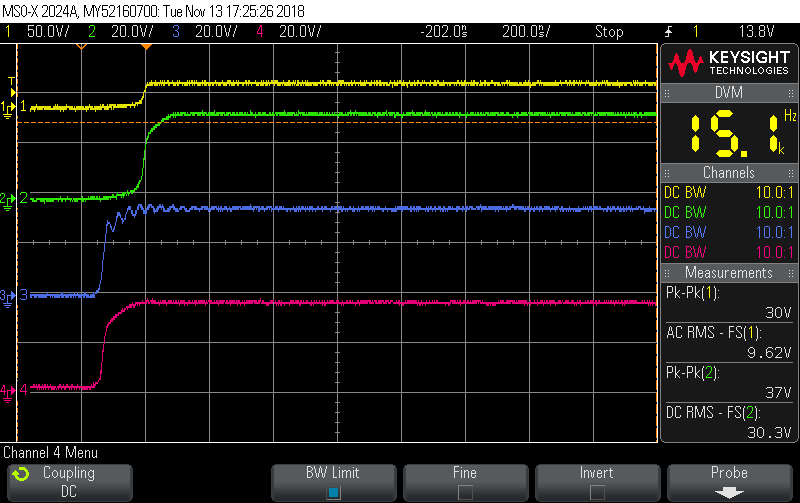
Driver output looks like this
Green middle point of the bridge. blue gate high FET.
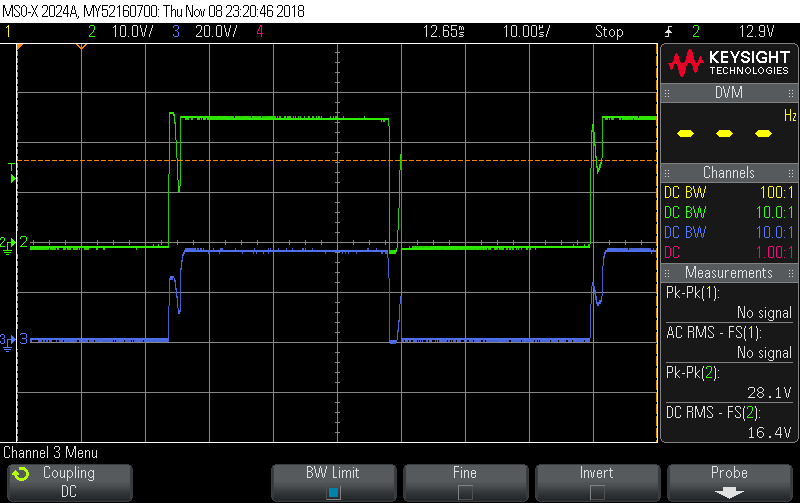
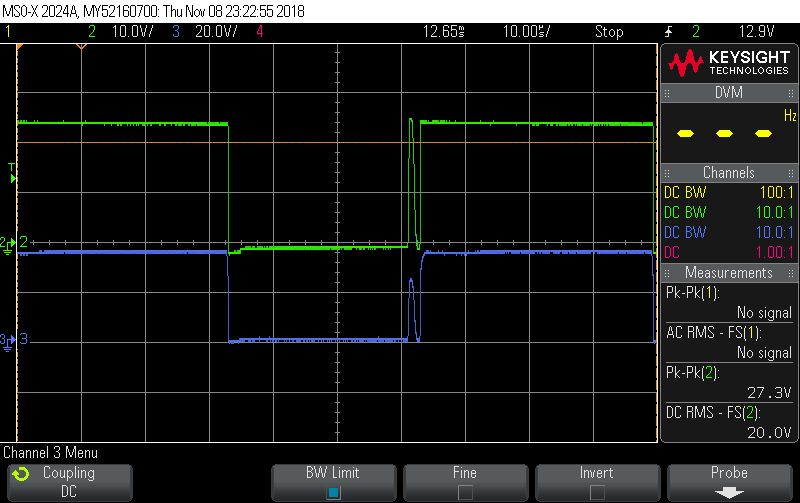
The output of DRV8305 looks better.

Ch2.