We are using the DRV8870 to drive a simple 24V DC Brush Motor. Actually we are using it in 9 places on one board.
I have attached my schematic.
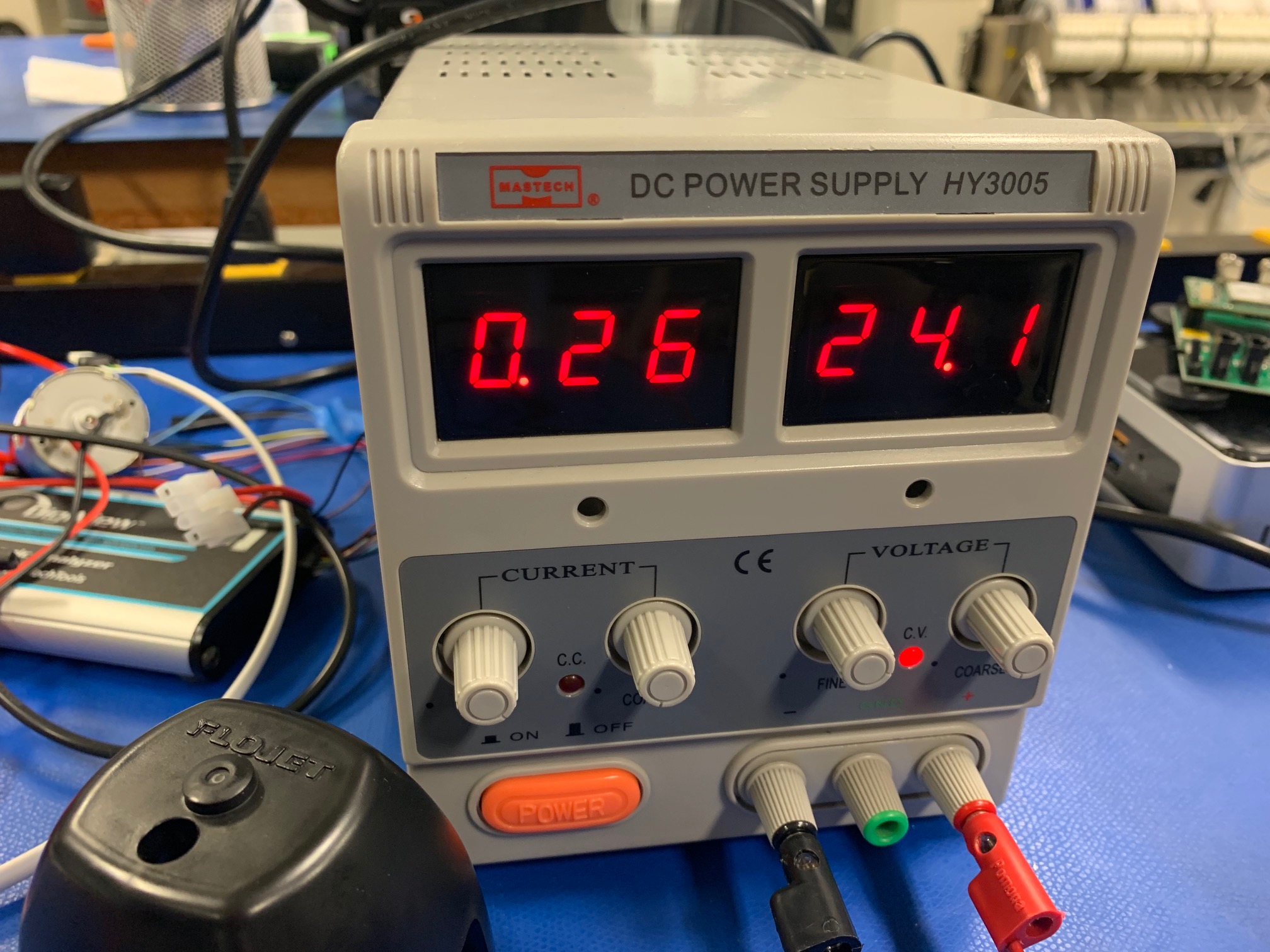
If I run my motor directly from a bench top power supply, at 24V it draws 240mA.
When I set IN2 HIGH and IN1 LOW I would expect to see the motor run in the same way.
The motor just hums... It draws the same current as if it was running, but it does not move.
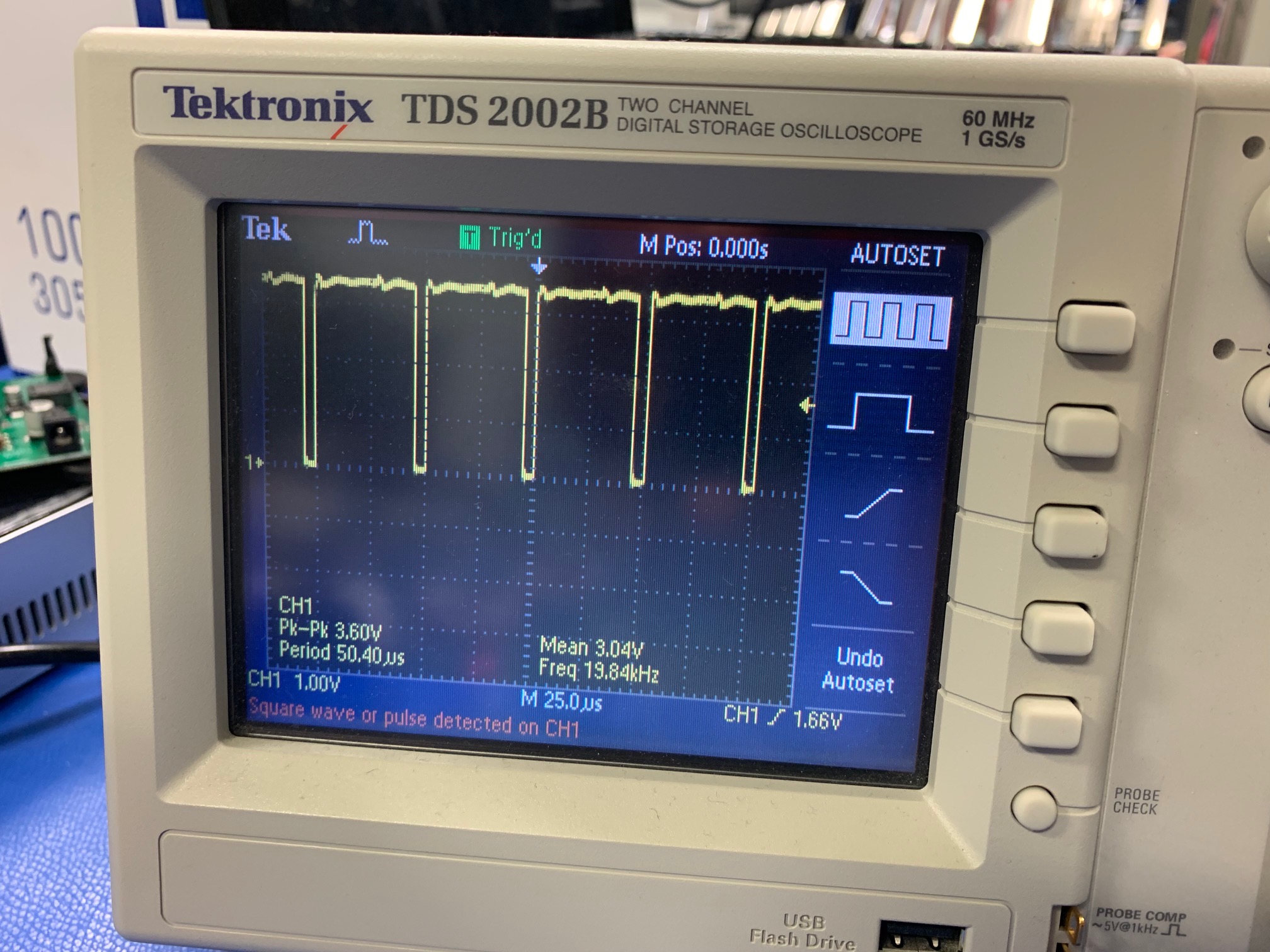
If I set IN1 LOW and PWM IN2 with 20KHz at 90% duty cycle the motor just hums and draws the same current.
We are verifying the 90% dutycycle PWM being applied to IN2 with our Oscilloscope. I have attached a picture showing this.
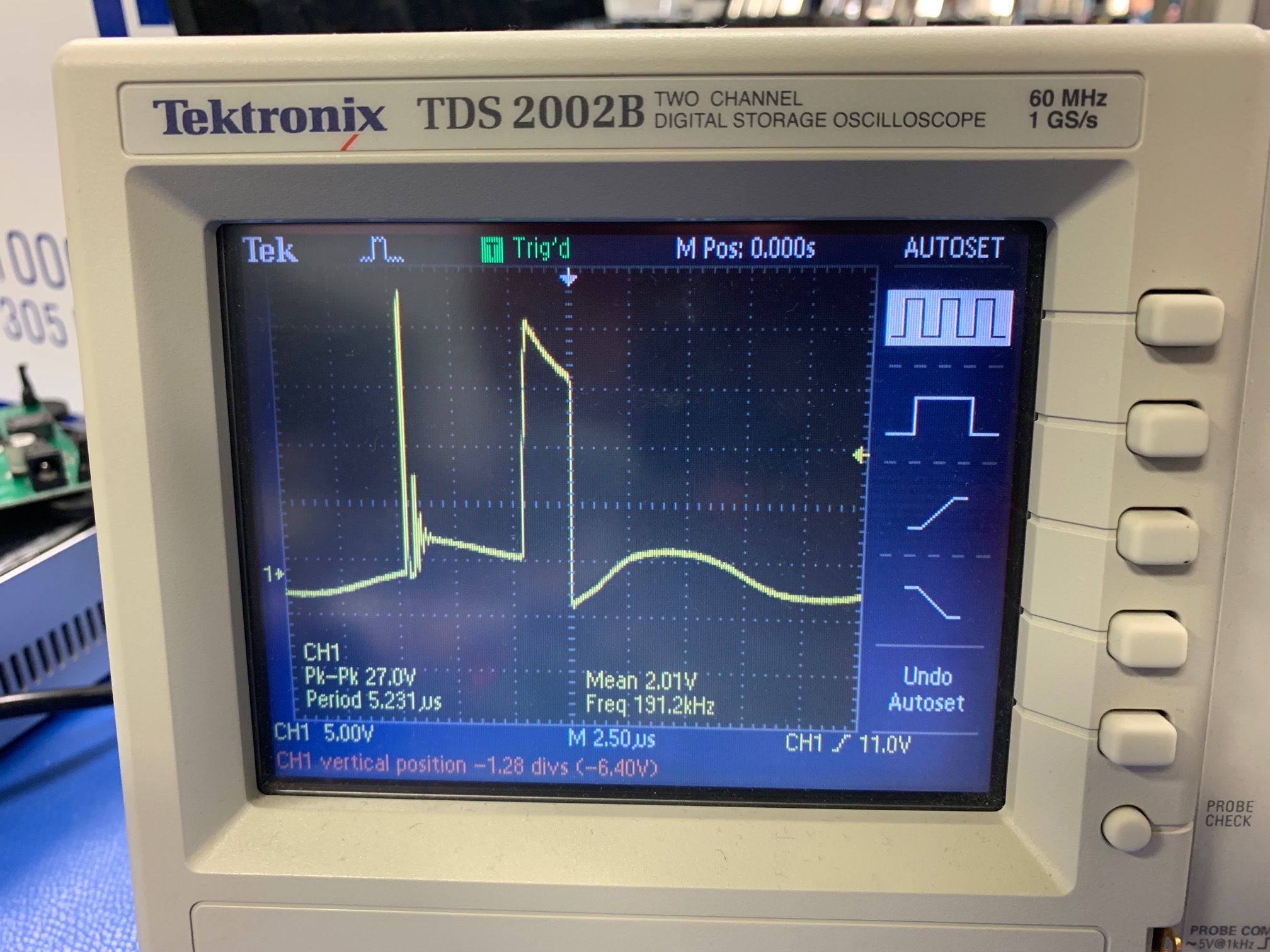
I have also attached a picture of the Oscilloscope showing the wave form when connected directly across the motor.
We increased the bulk capacitance from 68uF to 1000uF. No improvements. We increased it further to 2000uF, still no improvements.
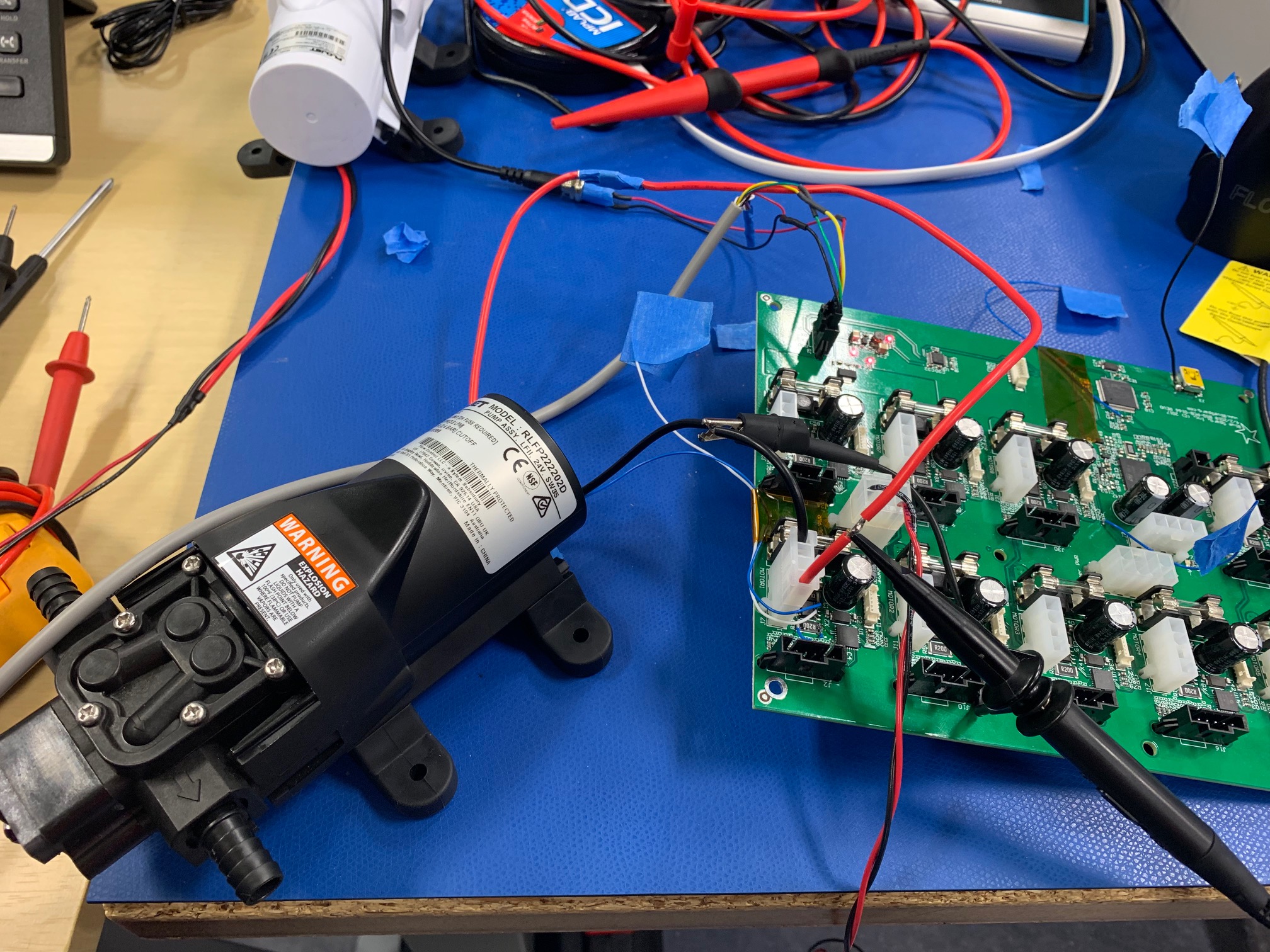
We added 2 large 22uH toroid inductors on the two motor leads still no improvement.
We repeated the tests. If start with 90% duty cycle the motor starts to spin as expected.
We can ramp from 90 to 100% it works.
If we start at 100% it does not work. The motor runs at approximately 20%, even though it should be running at 100%.If we stop, then start at 50% and then jump to 100% it will work.
See attached picture showing the inductors in place. I have also done this same testing with one other simple gear motor. Same results.
Can you please help me understand why this is happening? It doesn't make sense to us why at 100% NO PWM, simply turning IN2 HIGH and IN1 LOW, why our motor doesn't run 100% speed?
Did I miss something? We have replaced our Isen resistor with a jumper. Still no improvements. Please help! Thank you!