Hi,
I'm having problems with DRV8320H. Motor hums but does not spin.
I am running with following settings..
* Supply Voltage 12.5V@24A.
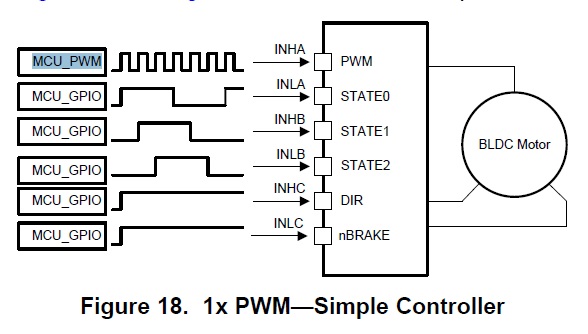
* 1x PWM with MODE pin floating.
* PWM / I/O controlling from Arduino.
* IDRIVE and VDS are pulled up to DVDD with 18K resistor.
* Motor resistance between each phase is 0.3 Ohm.
* Motor configured as Delta Winding.
Thanks,