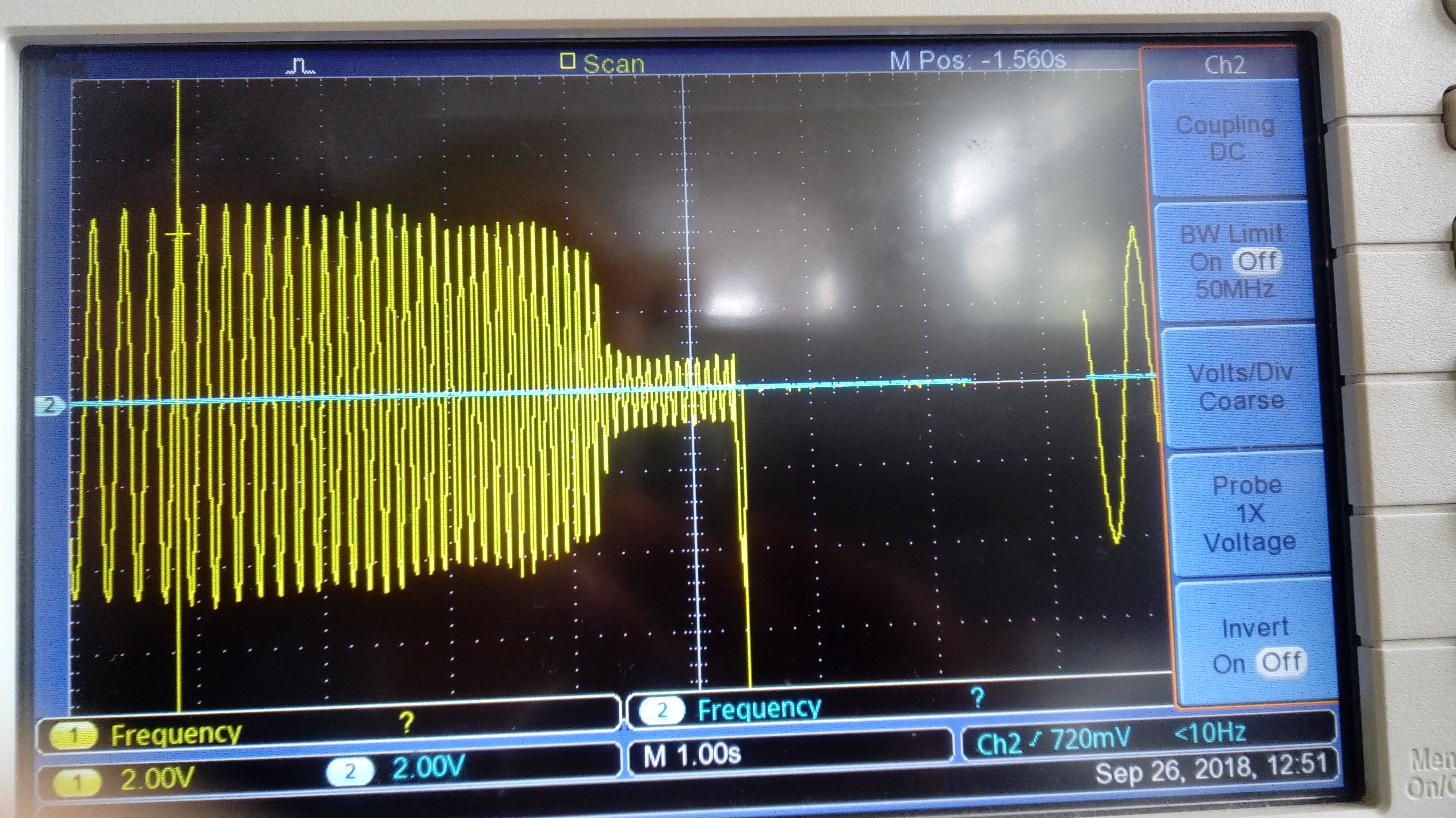
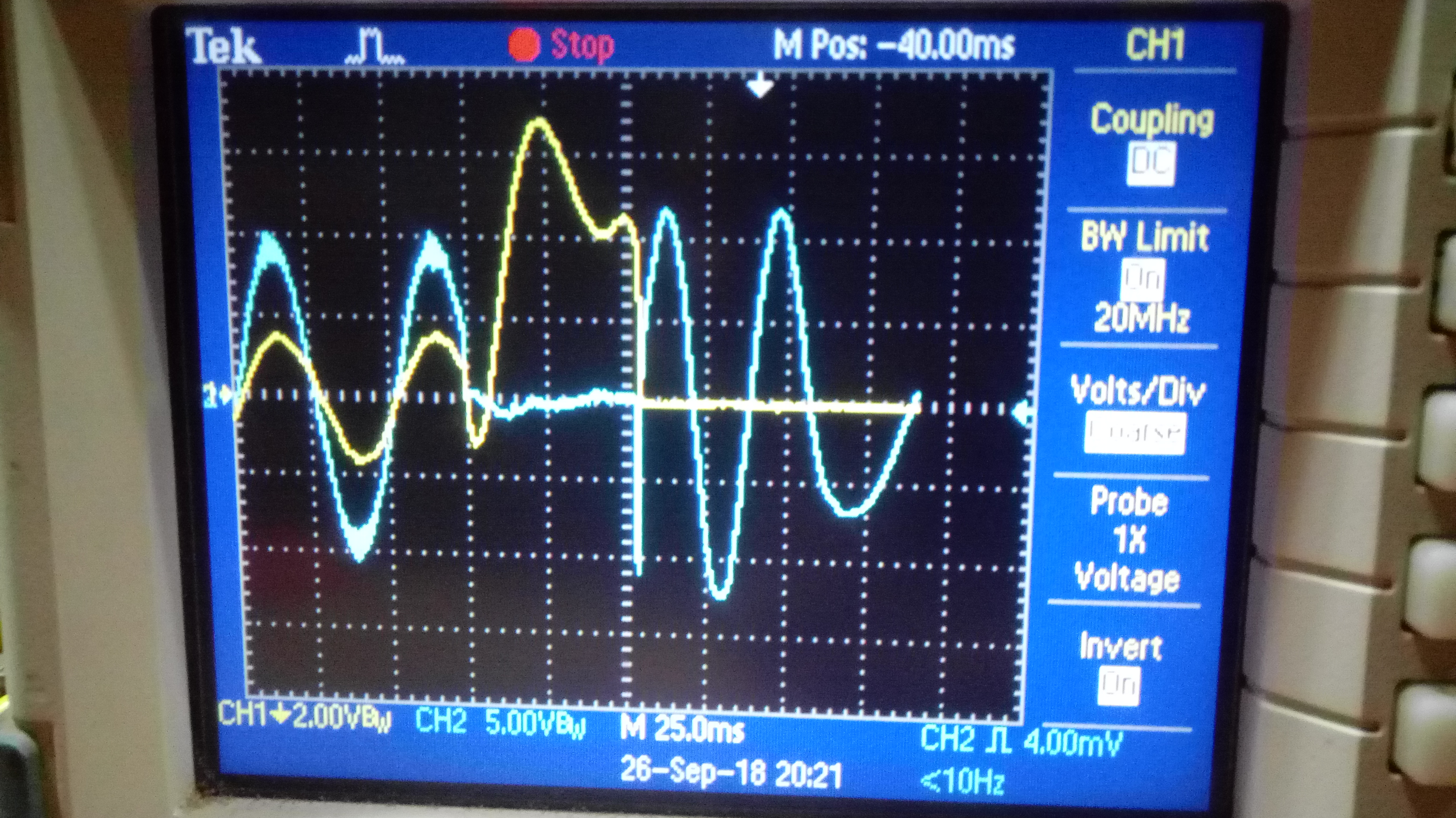
I am using DRV10983 for driving ceiling fan. Initially, i am rotating in open loop and i have disabled my close loop. The system starts with proper alignment time and with open to close loop threshold frequency it rotates for 5-10 seconds and then stops. I have measured Rm and Kt values using tunning guide as recommended by TI.
SYSTEM parameters:
Voltage: 24V
Current : 1.66A
Max Speed: 370rpm
Rm: 1.54 ohms
Kt: 692mV/Hz
initial speed:65% duty cycle
EEPROM data:
Address Value
0x20 = 0xCA
0x21 = 0xEC
0x22 = 0xCC
0x23 = 0x03
0x24 = 0xC0
0x25 = 0x7F
0x26 = 0x52
0x27 = 0x14
0x28 = 0xEC
0x29 = 0x39
0x2A = 0x03
0x2B = 0x0F
The above problem is with open loop. I have also tired to rotate in close loop. For close loop, speed above 70% duty cycle the system was working properly but for speed below 70% duty cycle (60% or 50% ) the system would run for 5 seconds and then stop indicating over current limit threshold. If i disable the over current limit threshold then to the fault will be same.
EEPROM data for close loop mode:
Address Value
0x20 = 0xCA
0x21 = 0xEC
0x22 = 0xCC
0x23 = 0x03
0x24 = 0xC0
0x25 = 0x7F
0x26 = 0x52
0x27 = 0x14
0x28 = 0xEC
0x29 = 0x39
0x2A = 0x03
0x2B = 0x0E