Other Parts Discussed in Thread: SYSBIOS, TDA2
Tool/software: TI-RTOS
Hi All,
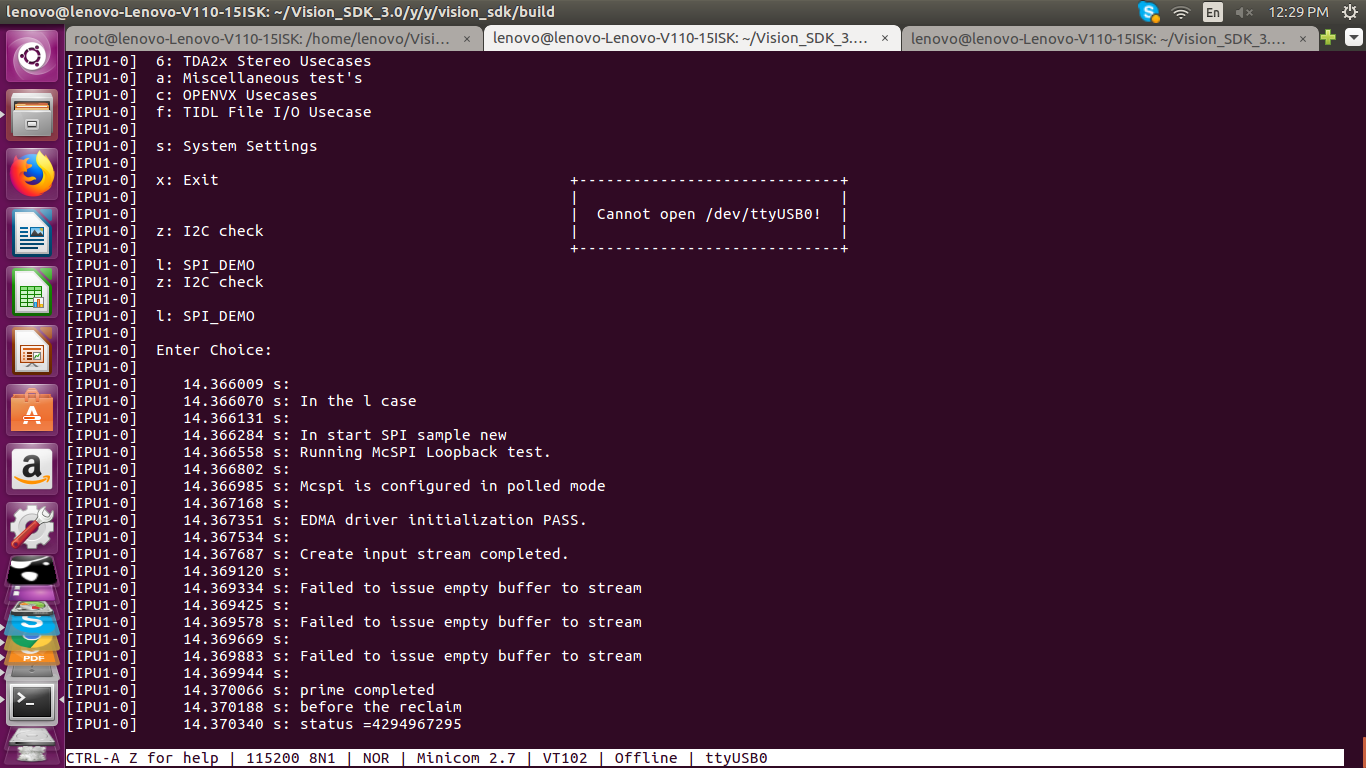
We are working on the ADAS's TDA2x platform.We designed our custom board using a TDA2HV processor.We use using the vision SDK for development.We are using the lvds_vip_multicam_view use case. We want to use SPI's data to in our use case.For SPI interfacing TI provided the utils_Mcspi.c and utils_MCspi.h file, This file only contains SPI initialization function.So, how we can write and read into the SPI transmit and receive buffer.
My query is,
1) Can you please share SPI'slave example code in which we can run in the use case?
Please let me know if you need the more information from our side.
Thanks,
Parth Modi