recently, i am working with LDC1000-STM32F3.
I have tried both of HW SPI and SW SPI to follow the guide in datasheet, but i all failed to get the data read from LDC1000.
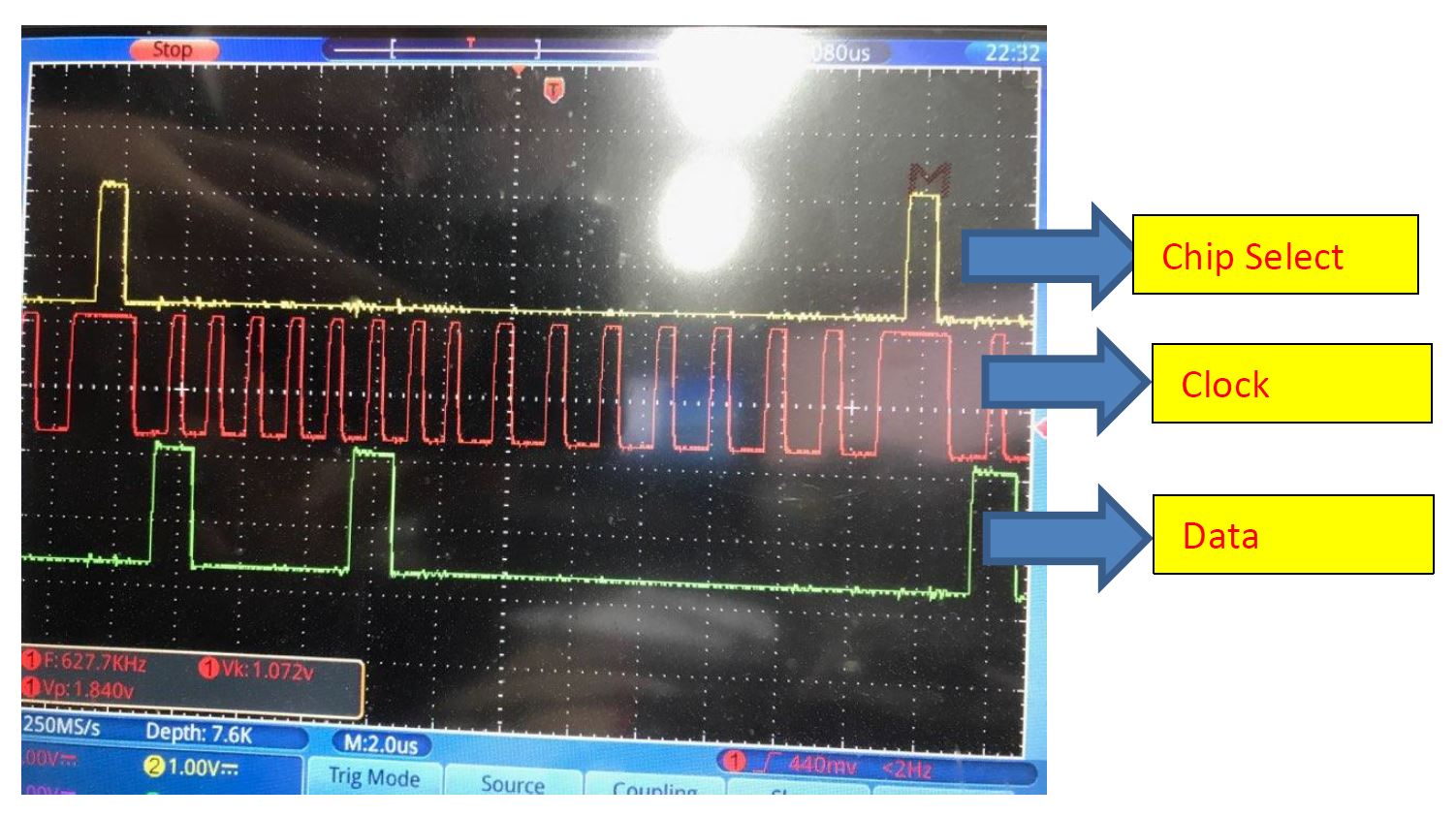
Here is the code i did. I checked the SCLK, MOSI, CBS, all them are correced with datasheet. i connected the head of LDC1000EVM+Sensor to my STM32F3
please tell me what i was wrong with this code.
Thnk you so much
#include "ldc1000.h"
/*----------------------------------------
Global variable
----------------------------------------*/
uint8_t RegArray[REG_LEN];
void delay_a(uint32_t nCount);
/*----------------------------------------
Function Function: LDC GPIO initialization
Function parameters: IO port connection diagram
INT <-> PA7 <-> GPIO <-> P6-3
CSB PA2 <-> <-> P6-2
DCLK <-> PA8 <-> 6MHz <-> P6-1
SCLK <-> PC10 <-> LDC_SPI_SCK <-> P6-4
SDO <-> PC11 <-> LDC_SPI_MISO <-> P6-5
SDI <-> PC12 <-> LDC_SPI_MOSI <-> P6-6
VIO <-> 3V3 <-> P6-9
GND <-> GND <-> P6-11
GND <-> GND <-> P7-8
+5V <-> +5V <-> P7-9
----------------------------------------*/
void LDC_GPIO_Init(void) {
GPIO_InitTypeDef GPIO_InitStructure;
// SPI_InitTypeDef SPI_InitStructure;
/*!< LDC_SPI disable */
SPI_Cmd(LDC_SPI, DISABLE);
/*!< LDC_SPI DeInit */
// SPI_I2S_DeInit(LDC_SPI);
/*!< Disable SPI clock */
// RCC_APB1PeriphClockCmd(LDC_SPI_CLK, DISABLE);
/* Enable clock port A,B,C */
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOC, ENABLE);
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOB, ENABLE);
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOA, ENABLE);
/* Configure MCO Pin: DCLK */
GPIO_InitStructure.GPIO_Pin = LDC_DCLK_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// Alternate function source set
GPIO_PinAFConfig(GPIOA, GPIO_PinSource8, GPIO_AF_0);
RCC_MCOConfig(RCC_MCOSource_SYSCLK);
/* Config LDC pin _ CS as GPIO function */
GPIO_InitStructure.GPIO_Pin = LDC_CS_PIN; //PA2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* Configure SPI pins: SCK, MOSI */
GPIO_InitStructure.GPIO_Pin = LDC_SPI_SCK_PIN | LDC_SPI_MOSI_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_Init(GPIO_LDC, &GPIO_InitStructure);
/* Configure SPI pins: MISO*/
GPIO_InitStructure.GPIO_Pin = LDC_SPI_MISO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_Init(GPIO_LDC, &GPIO_InitStructure);
/* Configure SPI pins PA7: INT*/
GPIO_InitStructure.GPIO_Pin = LDC_INT_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; /*!< High Speed:50MHz */
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// Init IO
GPIO_SetBits(GPIOA,LDC_CS_PIN);
GPIO_SetBits(GPIO_LDC,LDC_SPI_SCK_PIN);
GPIO_ResetBits(GPIO_LDC,LDC_SPI_MOSI_PIN);
GPIO_ResetBits(GPIO_LDC,LDC_SPI_MISO_PIN);
}
void LDC_WriteReg8(uint8_t dat)
{
uint8_t tmp=0;
uint32_t i = 0;
delay_a(1);
GPIO_ResetBits(GPIO_LDC,LDC_SPI_SCK_PIN);
delay_a(1);
// Write data _ Rising edge
for (i=0;i<7;i++)
{
tmp = (dat >> (7-i)) & 0x01;
GPIO_WriteBit(GPIO_LDC,LDC_SPI_MOSI_PIN,(BitAction)tmp);
delay_a(1);
GPIO_SetBits(GPIO_LDC,LDC_SPI_SCK_PIN);
delay_a(1);
GPIO_ResetBits(GPIO_LDC,LDC_SPI_SCK_PIN);
}
// Last bit
tmp = (dat >> (7-i)) & 0x01;
GPIO_WriteBit(GPIO_LDC,LDC_SPI_MOSI_PIN,(BitAction)tmp);
delay_a(1);
GPIO_SetBits(GPIO_LDC,LDC_SPI_SCK_PIN);
delay_a(5);
}
/*----------------------------------------
Function: LDC write register
Function parameters: - addr register address
- dat data
----------------------------------------*/
void LDC_WriteReg(int8_t addr, uint8_t dat)
{
uint8_t tmp=0;
uint32_t i = 0;
addr = addr & 0x7F; // The MSB is a 0-write register, which is a 1-read register
LDC_CS_LOW;
delay_a(1);
GPIO_ResetBits(GPIO_LDC,LDC_SPI_SCK_PIN);
delay_a(1);
// Write address _ Rising edge
for (i=0;i<8;i++)
{
tmp = (addr >> (7-i)) & 0x01;
GPIO_WriteBit(GPIOC,LDC_SPI_MOSI_PIN,(BitAction)tmp);
delay_a(1);
GPIO_SetBits(GPIO_LDC,LDC_SPI_SCK_PIN);
delay_a(1);
// GPIO_ResetBits(GPIO_LDC,LDC_SPI_MOSI_PIN);
GPIO_ResetBits(GPIO_LDC,LDC_SPI_SCK_PIN);
}
// Write data _ Rising edge
for (i=0;i<7;i++)
{
tmp = (dat >> (7-i)) & 0x01;
GPIO_WriteBit(GPIO_LDC,LDC_SPI_MOSI_PIN,(BitAction)tmp);
delay_a(1);
GPIO_SetBits(GPIO_LDC,LDC_SPI_SCK_PIN);
delay_a(1);
GPIO_ResetBits(GPIO_LDC,LDC_SPI_SCK_PIN);
}
// Last bit
tmp = (dat >> (7-i)) & 0x01;
GPIO_WriteBit(GPIO_LDC,LDC_SPI_MOSI_PIN,(BitAction)tmp);
delay_a(1);
GPIO_SetBits(GPIO_LDC,LDC_SPI_SCK_PIN);
delay_a(5);
LDC_CS_HIGH;
delay_a(2);
}
/*----------------------------------------
Function: LDC read register
Function parameters: - addr register address
----------------------------------------*/
uint8_t LDC_ReadReg(int8_t addr)
{
uint8_t tmp=0;
uint32_t i = 0;
uint32_t data=0;
addr = addr | 0x80; // The MSB is 1-read register
LDC_CS_LOW;
delay_a(1);
GPIO_ResetBits(GPIO_LDC,LDC_SPI_SCK_PIN);
delay_a(1);
// Write address _ Rising edge
for (i=0;i<7;i++)
{
tmp = (addr >> (7-i)) & 0x01;
GPIO_WriteBit(GPIO_LDC,LDC_SPI_MOSI_PIN,(BitAction)tmp);
delay_a(1);
GPIO_SetBits(GPIO_LDC,LDC_SPI_SCK_PIN);
delay_a(1);
GPIO_ResetBits(GPIO_LDC,LDC_SPI_SCK_PIN);
}
// Last Address bit
tmp = addr & 0x01;
GPIO_WriteBit(GPIOC,LDC_SPI_MOSI_PIN,(BitAction)tmp);
delay_a(1);
GPIO_SetBits(GPIO_LDC,LDC_SPI_SCK_PIN);
// Read data _ Falling edge
for (i=0;i<8;i++)
{
GPIO_ResetBits(GPIO_LDC,LDC_SPI_SCK_PIN);
delay_a(1);
tmp = GPIO_ReadInputDataBit(GPIO_LDC,LDC_SPI_MISO_PIN);
data |= (uint32_t)((tmp & 0x01) << (7-i));
delay_a(1);
GPIO_SetBits(GPIO_LDC,LDC_SPI_SCK_PIN);
delay_a(1);
}
delay_a(1);
//GPIO_ResetBits(GPIO_LDC,LDC_SPI_SCK_PIN);
LDC_CS_HIGH;
// delay_a(1);
}
// // Last Address bit
// tmp = addr & 0x01;
// GPIO_WriteBit(GPIOC,LDC_SPI_MOSI_PIN,(BitAction)tmp);
// delay_a(1);
// GPIO_SetBits(GPIO_LDC,LDC_SPI_SCK_PIN);
//
// // Read data _ Falling edge
// for (i=0;i<8;i++)
// {
// GPIO_ResetBits(GPIO_LDC,LDC_SPI_SCK_PIN);
// delay_a(1);
// tmp = GPIO_ReadInputDataBit(GPIO_LDC,LDC_SPI_MISO_PIN);
// data |= (uint32_t)((tmp & 0x01) << (7-i));
//
// delay_a(1);
// GPIO_SetBits(GPIO_LDC,LDC_SPI_SCK_PIN);
// delay_a(1);
// }
//
// delay_a(1);
// //GPIO_ResetBits(GPIO_LDC,LDC_SPI_SCK_PIN);
// LDC_CS_HIGH;
// // delay_a(1);
// // Read data _ Rising edge
// for (i=0;i<7;i++)
// {
// delay_a(1);
// GPIO_SetBits(GPIO_LDC,LDC_SPI_SCK_PIN);
// delay_a(1);
//
// tmp = GPIO_ReadInputDataBit(GPIO_LDC,LDC_SPI_MISO_PIN);
// data |= (uint32_t)((tmp & 0x01) << (7-i));
//
// GPIO_ResetBits(GPIO_LDC,LDC_SPI_SCK_PIN);
// delay_a(1);
// }
//
// GPIO_SetBits(GPIO_LDC,LDC_SPI_SCK_PIN);
// delay_a(1);
//
// tmp = GPIO_ReadInputDataBit(GPIO_LDC,LDC_SPI_MISO_PIN);
// data |= (uint32_t)((tmp & 0x01) << (7-i));
//
// delay_a(2);
// //GPIO_ResetBits(GPIO_LDC,LDC_SPI_SCK_PIN);
// LDC_CS_HIGH;
// return data;
// LDC_WriteReg(LDC_CMD_RPMAX, 0x13); //0x13
// //delay(10);
// LDC_WriteReg(LDC_CMD_RPMIN, 0x3B); //0x13
// //delay(10);
// LDC_WriteReg(LDC_CMD_SENSORFREQ, 0x94); //0x94 - B3- 1MHz
// //delay(10);
// LDC_WriteReg(LDC_CMD_LDCCONFIG, 0x13); //0x17
// //delay(10);
// LDC_WriteReg(LDC_CMD_CLKCONFIG, 0x01); //0x00
// //delay(10);
// LDC_WriteReg(LDC_CMD_INTCONFIG, 0x02); //0x02
// //delay(10);
// LDC_WriteReg(LDC_CMD_THRESHILSB, 0x50); //0x50
// //delay(10);
// LDC_WriteReg(LDC_CMD_THRESHIMSB, 0x14 );//0x14
// //delay(10);
// LDC_WriteReg(LDC_CMD_THRESLOLSB, 0xC0); //0xC0
// //delay(10);
// LDC_WriteReg(LDC_CMD_THRESLOMSB, 0x12); //0x12
// //delay(10);
// LDC_WriteReg(LDC_CMD_PWRCONFIG, 0x01); // Active Mode, Conversion is Enabled
/*----------------------------------------
Function: LDC initialization
----------------------------------------*/
void LDC_Init(void)
{
LDC_GPIO_Init();
LDC_WriteReg(LDC_CMD_RPMAX, 0x13); //0x13
//delay(10);
LDC_WriteReg(LDC_CMD_RPMIN, 0x3B); //0x13
//delay(10);
LDC_WriteReg(LDC_CMD_SENSORFREQ, 0x94); //0x94 - B3- 1MHz
//delay(10);
LDC_WriteReg(LDC_CMD_LDCCONFIG, 0x13); //0x17
//delay(10);
LDC_WriteReg(LDC_CMD_CLKCONFIG, 0x01); //0x00
//delay(10);
LDC_WriteReg(LDC_CMD_INTCONFIG, 0x02); //0x02
//delay(10);
LDC_WriteReg(LDC_CMD_THRESHILSB, 0x50); //0x50
//delay(10);
LDC_WriteReg(LDC_CMD_THRESHIMSB, 0x14 );//0x14
//delay(10);
LDC_WriteReg(LDC_CMD_THRESLOLSB, 0xC0); //0xC0
//delay(10);
LDC_WriteReg(LDC_CMD_THRESLOMSB, 0x12); //0x12
//delay(10);
LDC_WriteReg(LDC_CMD_PWRCONFIG, 0x01); // Active Mode,
}
/*----------------------------------------
Function: LDC initialization
----------------------------------------*/
void LDC_Init1(void)
{
LDC_GPIO_Init();
LDC_CS_LOW;
LDC_WriteReg(LDC_CMD_RPMAX, 0x13); //0x13
//delay(10);
LDC_WriteReg8(0x3B); //0x13
//delay(10);
LDC_WriteReg8(0x94); //0x94 - B3- 1MHz
//delay(10);
LDC_WriteReg8(0x13); //0x17
//delay(10);
LDC_WriteReg8(0x01); //0x00
//delay(10);
LDC_WriteReg8(0x02); //0x02
//delay(10);
LDC_WriteReg8(0x50); //0x50
//delay(10);
LDC_WriteReg8(0x14 );//0x14
//delay(10);
LDC_WriteReg8(0xC0); //0xC0
//delay(10);
LDC_WriteReg8(0x12); //0x12
//delay(10);
LDC_WriteReg8(0x01); // Active Mode
delay(1);
LDC_CS_HIGH;
}
/*----------------------------------------
Function: Send one byte of data to the LDC
Function parameters: the data to be sent dat
Return Value: The device sends back the data
----------------------------------------*/
uint8_t LDC_SendByte(uint8_t dat)
{
LDC_CS_LOW;
while(SPI_I2S_GetFlagStatus(LDC_SPI, SPI_I2S_FLAG_TXE) == RESET);
SPI_SendData8(LDC_SPI, dat);
while(SPI_I2S_GetFlagStatus(LDC_SPI, SPI_I2S_FLAG_RXNE) == RESET);
LDC_CS_HIGH;
return (uint8_t)LDC_SPI->DR;
}
/*----------------------------------------
Function Function: Read LDC one byte
Function parameters: empty
Return Value: One byte of data sent from the device
----------------------------------------*/
uint8_t LDC_ReadByte(void)
{
return 0x00;
}
/*----------------------------------------
Function: Read LDC len bytes
Function parameters: - addr
- pBuffer
- len
Call example: LDC_ReadBytes (LDC_CMD_REVID, & RegArray [0], 12);
----------------------------------------*/
void LDC_ReadBytes(int8_t addr, uint8_t* pBuffer, uint8_t len)
{
addr = addr | 0x80; //Read Data
LDC_CS_LOW;
LDC_SendByte(addr);
while(len > 0)
{
*pBuffer = LDC_ReadByte();
pBuffer++;
len--;
}
LDC_CS_HIGH;
}
//void LDC1000_Reg_Check(){
////Rp_MAX
// LDC_ReadReg
//
//}
//
void Induct_Measure(void){
unsigned long Fcount, prox, temp, temp1;
char txt1[21], txt2[15];
float ind, fsens;
LDC_CS_LOW;
LDC_ReadReg(0xA1);
prox=LDC_ReadReg(0xFF);
LDC_CS_HIGH;
LDC_CS_LOW;
LDC_ReadReg(0xA2);
temp1=LDC_ReadReg(0xFF);
LDC_CS_HIGH;
temp1=temp1<<8;
prox=prox+temp1;
// LongLongUnsignedToStr(prox, txt1);
// UART1_Write_Text("Proximity Data = ");
// UART1_Write_Text(txt1);
// UART1_Write(13);
// UART1_Write(10);
delay(100);
LDC_CS_LOW;
LDC_ReadReg(0xA3);
Fcount=LDC_ReadReg(0xFF);
LDC_CS_HIGH;
LDC_CS_LOW;
LDC_ReadReg(0xA4);
temp=LDC_ReadReg(0xFF);
LDC_CS_HIGH;
temp=temp<<16;
Fcount=Fcount+temp;
//Measuring Sensor frequency
// fsens = (1/3)*(Fext/Fcount)*(Response Time)
//Fext is the frequency of the external clock (6MHz)
//Fcount is the value obtained from the Frequency Counter Data register(address 0x23,0x24,0x25)
//Response Time is the programmed response time (see LDC configuration register, address 0x04)
fsens=(1./3.)*(6000000./Fcount)*(6144);
//Measuring Sensor inductance
ind=1e6/(100e-12*((2.*3.14*fsens)*(2.*3.14*fsens)));
// FloatToStr(ind, txt2);
// UART1_Write_Text("Impedance L = ");
// UART1_Write_Text(txt2);
// UART1_Write_Text(" uH");
// UART1_Write(13);
// UART1_Write(10);
// UART1_Write(13);
// UART1_Write(10);
delay(100);
}
// Delay ms
void delay_a(uint32_t nCount) {
uint32_t index = 0;
for(index = (nCount*1); index != 0; index--) ;
}
//void LDC_WriteReg(int8_t addr, uint8_t dat)
//{
// addr = addr & 0x7F; // The MSB is a 0-write register, which is a 1-read register
// LDC_CS_LOW;
// SPI_SendData8(LDC_SPI, addr);
// while(SPI_I2S_GetFlagStatus(LDC_SPI, SPI_I2S_FLAG_TXE) == RESET);
// SPI_SendData8(LDC_SPI, dat);
// while(SPI_I2S_GetFlagStatus(LDC_SPI, SPI_I2S_FLAG_TXE) == RESET);
// //LDC_CS_HIGH;
//}
//
//uint8_t LDC_ReadReg(int8_t addr)
//{
// uint8_t temp;
// addr = addr | 0x80;//MSB is a 1-read register, which is a 0-write register
// LDC_CS_LOW;
// while(SPI_I2S_GetFlagStatus(LDC_SPI, SPI_I2S_FLAG_TXE) == RESET);
// SPI_SendData8(LDC_SPI, addr);
// while(SPI_I2S_GetFlagStatus(LDC_SPI, SPI_I2S_FLAG_BSY) == RESET);
// SPI_SendData8(LDC_SPI, 0x00);
// while(SPI_I2S_GetFlagStatus(LDC_SPI, SPI_I2S_FLAG_BSY) == RESET);
//
// temp = (uint8_t)SPI_ReceiveData8(LDC_SPI);
// while(SPI_I2S_GetFlagStatus(LDC_SPI, SPI_I2S_FLAG_RXNE) == RESET);
//
// //LDC_CS_HIGH;
// return temp;
//}
//
//void LDC_GPIO_Init(void) {
// GPIO_InitTypeDef GPIO_InitStructure;
// SPI_InitTypeDef SPI_InitStructure;
//
// /*!< LDC_SPI disable */
// SPI_Cmd(LDC_SPI, DISABLE);
//
// /*!< LDC_SPI DeInit */
// SPI_I2S_DeInit(LDC_SPI);
//
// /*!< Disable SPI clock */
// RCC_APB1PeriphClockCmd(LDC_SPI_CLK, DISABLE);
//
// /* Enable clock port A,B,C */
// RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOC, ENABLE);
// RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOB, ENABLE);
// RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOA, ENABLE);
//
// /* Config LDC pin _ CS as GPIO function */
// GPIO_InitStructure.GPIO_Pin = LDC_CS_PIN; //PA2
// GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
// GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
// GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
// GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
// GPIO_Init(GPIOA, &GPIO_InitStructure);
//
// /* Configure MCO Pin: DCLK */
// GPIO_InitStructure.GPIO_Pin = LDC_DCLK_PIN;
// GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
// GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
// GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
// GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
// GPIO_Init(GPIOA, &GPIO_InitStructure);
// // Alternate function source set
// GPIO_PinAFConfig(GPIOA, GPIO_PinSource8, GPIO_AF_0);
// RCC_MCOConfig(RCC_MCOSource_SYSCLK);
//
// /* Configure SPI pins: SCK, MISO and MOSI */
// GPIO_InitStructure.GPIO_Pin = LDC_SPI_SCK_PIN | LDC_SPI_MOSI_PIN;
// GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
// GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
// GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
// GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
// GPIO_Init(GPIO_LDC, &GPIO_InitStructure);
//
// /* Configure SPI pins: MISO*/
// GPIO_InitStructure.GPIO_Pin = LDC_SPI_MISO_PIN;
// GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
// GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
// GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
// GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
// GPIO_Init(GPIO_LDC, &GPIO_InitStructure);
//
// /* Configure SPI pins PA7: INT*/
// GPIO_InitStructure.GPIO_Pin = LDC_INT_PIN;
// GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
// GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
// GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; /*!< High Speed:50MHz */
// GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
// GPIO_Init(GPIOA, &GPIO_InitStructure);
//
// /* SPI3 configuration */
//
// /*!< Enable SPI clock */
// RCC_APB1PeriphClockCmd(LDC_SPI_CLK, ENABLE);
//
// /* Connect PC.10 to SPI SCK */
// GPIO_PinAFConfig(GPIO_LDC, LDC_SPI_SCK_SOURCE, LDC_SPI_SCK_AF);
//
// /* Connect PC.11 to SPI MISO */
// GPIO_PinAFConfig(GPIO_LDC, LDC_SPI_MISO_SOURCE, LDC_SPI_MOSI_AF);
//
// /* Connect PC.12 to SPI MOSI */
// GPIO_PinAFConfig(GPIO_LDC, LDC_SPI_MOSI_SOURCE, LDC_SPI_MOSI_AF);
//
// SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex;
// SPI_InitStructure.SPI_Mode = SPI_Mode_Master;
// SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b;
// SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low;
// SPI_InitStructure.SPI_CPHA = SPI_CPHA_1Edge;
// SPI_InitStructure.SPI_NSS = SPI_NSS_Soft;
// SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_32; // SPI_BaudRatePrescaler_4
// SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB;
// SPI_InitStructure.SPI_CRCPolynomial = 7;
// SPI_Init(LDC_SPI, &SPI_InitStructure);
//
// /* Configure the RX FIFO Threshold to Quarter Full */
// // SPI_RxFIFOThresholdConfig(LDC_SPI, SPI_RxFIFOThreshold_QF);
//
// SPI_Cmd(LDC_SPI, ENABLE); /* Enable SPI3 */
//
//}