


Inductive Sensing – what are the benefits?
TI’s inductance-to-digital converter (LDC) devices enable precision inductive sensing, which is extremely powerful technology for many applications. Our technology uses an LC tank sensor and detects changes in sensor inductance due to target movement. Some benefits of inductive sensing include:
- No magnets are required
- Immunity to DC magnetic fields
- Reliability by virtue of being contactless
- Insensitivity to environmental contaminants like dirt, dust, and water
- TI’s LDCs can achieve sub-micron resolution
- LDC can be located remotely from the sensor
The system is extremely flexible, with low-cost sensors and a wide variety of possible target conductors. Our touch-on-metal buttons enable seamless mechanical cases for robust waterproof design.
When is inductive sensing right for my application?
We highly recommend inductive sensing for the following applications:
- metal proximity detection
- incremental encoders
- event counting
- button replacement applications
If your application is not listed above, the following checklist may help determine if inductive sensing is a suitable solution. Please note that the ideal inductive sensing system has a highly conductive target that is at least as large at the sensor coil and is located very close to the sensor coil.
1. What is the target?
Both the target’s size and material are important for inductive sensing. Only metal targets are suitable for inductive sensing, and more conductive metals like copper and aluminum have stronger responses. The target should be at least as large as the sensor coil in order to maximize the inductive response. Targets that are smaller than the sensor coil will have reduced sensing distances, and targets that are extremely small compared to the sensor coil may not be detectable at all.
2. How far away is the target?
The sensing distance of an inductive sensing system is primarily based on the outer diameter of the sensor coil. Most LDC devices can only sense up to 50% of the sensor coil’s diameter. Sensing distances beyond 10cm are not feasible. Note that the closer the target is to the coil, the stronger the inductive response will be.
3. How much space is available for a coil?
Larger coils have larger sensing distances. The maximum area available for a coil should be used, except when this will make the coil larger than the target. The coil should be sized so that it is twice as large as the distance between the target and the coil. Various LDC devices can support coils with diameters between 3mm and 5cm.
4. What sample rate is needed?
The maximum sample rate of any LDC device is 183.8 kSPS. Most HMI applications do not need more than 80 SPS, which is supported by all LDC devices.
5. What resolution is needed?
Resolution and sample rate are inversely related. High resolution devices can achieve submicron resolution for very close targets, but they need to use the slowest sample rates to do so. Resolution is maximized when the target is closer than 20% of the sensor coil’s diameter. Note that it is much easier to achieve high resolutions for relative position measurements than for absolute position measurements. For absolute position measurements we recommend using a reference coil to compensate for environmental changes.
How do I get started with Inductive Sensing?
If you have never worked with inductive sensing before, we recommend reading some of our introductory application notes. They discuss the basic physics of inductive sensing and the principles behind designing a robust inductive sensing system. We also have some design guides and reference designs for specific applications. For both experienced and new inductive sensing designers, we have a variety of EVMs for easy prototyping. Please note that we highly recommend working with mechanical engineers when designing the inductive sensing system, because small movements of the target or sensor can significantly impact the measurements.
Introductory app notes
TI Designs
- Inductive Touch Stainless Steel Keypad Reference Design
- Inductive Sensing 32-Position Encoder Knob Reference Design
- 1 Degree Dial Reference Design
- LDC0851 Event Counting Reference Design
- ESI + LDC Inductive Linear Position Sensing Reference Design
EVMs
- LDC1314, LDC1614, LDC2114, LDC0851, LDC1101
- LDCTOUCHCOMCOILEVM (for the LDC2114EVM)
- LDCCOILEVM (for LDC1xxxEVMs)
- Sensing Solutions GUI
EVMs, Software, and GUI
My EVM can’t connect the Sensing Solutions GUI. What should I try?
- Q1: I have 'bricked' my LDC1312, LDC1314, LDC1612, or LDC1614 EVM during a failed firmware upload attempt. What can I do to restore functionality?
- Q2: Windows 8 prevents me from installing the LDC EVM drivers because of missing digital signature information. How can I install the drivers?
Do you have any example firmware or software?
Example firmware is included with the Sensing Solutions GUI download.
- Q3: How can I communicate directly with the MSP430 on the LDC1612, LDC1614, LDC1312, or LDC1314 EVM?
- Q4: Do you have any code examples for communicating directly with the MSP430 on the LDC1612, LDC1614, LDC1312, or LDC1314 EVM?
General EVM Questions
- Q5: Can I connect multiple LDC EVMs to the same computer?
- Q6: What does the red LED on the LDC1312, LDC1314, LDC1612, and LDC1614 EVMs indicate?
How do I design my inductive sensing system?
Typical Design Flow
- Determine what mechanical movement/position needs to be measured
- Determine measurement configuration: axial, lateral, or rotational
- Select target
- Optimize the target if possible (for size, thickness, conductivity, etc)
- Determine sensor size
- Use the biggest sensor that fits within physical constraints
- Select LDC Device using the Selection Guide
- Set sample rate
- Evaluate the measurement resolution and SNR
- This is a function of sensor size, target range and construction, and sample rate
Detailed Guides and Tools
- LDC Sensor Design
- LDC Target Design
- Inductive Touch System Design Guide
- LDC0851 Quick Start Guide
- LDC calculator – powerful excel calculator tool for designing coils and configuring LDC devices
- Coil designer Webench tool
- FEMM – free simulation tool for electromagnetic problems. Try our FEMM excel calculator tool (included in the LDC calculator)!
Frequently Asked Design Questions
- Q7: What is the maximum target sensing distance?
- Q8: I use a rectangular coil. What is the maximum sensing distance?
- Q9: I am using a small coil or spring with very low inductance. Can I still use it as a sensor?
- Q10: Can I use an Inductance-to-Digital converter to measure lateral movement (linear position sensor)?
- Q11: How can I design a rectangular, stretched, or racetrack coil?
- Q12: Can I multiplex sensors with a single LDC device?
- Q13: I am not using all available PCB layers for my PCB coil design. Should I create a GND plane on the other layers?
- Q14: What is the recommended copper thickness for a PCB coil?
- Q15. What are the general guidelines for sensing a target through metal?
- Q16: What do I need to consider when using a PCB coil for gear tooth counting?
- Q17: What is the influence of a motor magnetic field on LDC?
- Q18: I have several coils in my system. Will the coils interfere?
How do I configure the LDC for my coil?
Configuration Application Notes
Every LDC device needs some configuration to optimize its performance with custom sensors. We recommend starting here:
- Setting LDC131x, LDC161x, and LDC1101 Sensor Drive Configuration
- Optimizing L Measurement Resolution for the LDC161x and LDC1101
- Measuring Rp of an L-C Sensor for Inductive Sensing
- Inductive Touch – Configuring LDC2114 Touch-Button Sensitivity
- LDC0851 Quick-Start Guide
Frequently Asked Configuration Questions
- Q19: How can I determine the optimal drive current on LDC1312, LDC1314, LDC1612, or LDC1614 if I don't know RP?
- Q20: What is the maximum sample rate of the LDC131x and LDC161x?
I am getting strange output data from my LDC system. What’s wrong?
Common Questions
- Q21: Why does inductance decrease when ferrous material is near the coil?
- Q22: When I touch the sensor coil, the GUI shows an increase in inductance. Why?
- Q23: I am holding a permanent magnet close to coil and can see a decrease in inductance. Is the sensor affected by the magnetic fields of the magnet?
- Q24: Why do I see spikes in the output of LDC1312, LDC1314, LDC1612, or LDC1614?
Answers
Q1: I have 'bricked' my LDC1312, LDC1314, LDC1612, or LDC1614 EVM during a failed firmware upload attempt. What can I do to restore functionality?
Answer: If you bricked your EVM, you may be able to re-flash the EVM as described in the user guide by connecting the PUR pin to VUSB. This can be done on the LDC1614 rev B EVM by connecting R6 to C29 as shown below.

Q2: Windows 8 prevents me from installing the LDC EVM drivers because of missing digital signature information. How can I install the drivers?
Answer: If you have problems to install the drivers under Windows 8, follow this procedure:
- Disable secure boot from BIOS/EFI
- Windows Key + R
- Enter shutdown.exe /r /o /f /t 00
- Click the "OK" button
- System will restart to a "Choose an option" screen
- Select "Troubleshoot" from "Choose an option" screen
- Select "Advanced options" from "Troubleshoot" screen
- Select "Windows Startup Settings" from "Advanced options" screen
- Click "Restart" button. System will restart to "Advanced Boot Options" screen
- Select "Disable Driver Signature Enforcement"
- Once the system starts, install the ldc1OOO.inf drivers
Q3: How can I communicate directly with the MSP430 on the LDC1612, LDC1614, LDC1312, or LDC1314 EVM?
Answer:
LDC13xx/16xx communication is accomplished via driver-simulated COM protocols. Settings are:
Baud rate 115200
No termination CHAR
Data bits 8
Parity None
Stop bit 1
Flow control: None
Write register command
Write register command is used to set desired register settings. It is formed as follow:
4C 15 01 00 04 2A XX YY YY ZZ
Where
4C 15 01 00 04 2A = Write register command header.
XX is the register address to be written, expressed as HEX. For example, if register 12 is x0C, so XX = 0C
YY YY is the 2 bytes of data to be written, in HEX, MSB 1st.
ZZ is CRC-8 check for the command string, which is explained below.
Each HEX value represents corresponding ASCII character, which is written to COM port.
For example, if we need to write to register 11 (x1B) a value of x820D, the command is
4C 15 01 00 04 2A 1B 82 0D A3. In ASCII it appears as
After writing a register it is required to read back 32 bytes – MCU response to a command. Convert ASCII string into array of 8-bit numbers. It consists of the command sent + 21 bytes of 00 + CRC value. In the above example, correct response is 4C 15 01 00 04 2A 1B 82 0D A3 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00A3.
4th byte (indicated in red above) is an error field. If this byte is 00, there is no error.
Read register command
Read register command is used to check LDC register settings. Read process consists of 2 steps:
1) Set register command, which is required to indicate which register is to be read. The command format is: 4C 15 01 00 02 2A XX ZZ, where XX is the register address to be read, and ZZ is CRC-8 check for the command string. For example, to read back register 1B the command is 4C 15 01 00 02 2A 1B 10. After sending this command it is required to read 32 bytes. The 4th byte will indicate an error, if any.
2) Read register command, in the format 4C 14 01 00 02 2A 02 ZZ, where ZZ is CRC-8 check. After sending this command it is required to read 32 bytes, as noted above. The 4th byte will indicate an error, if any. 7th and 8th bytes are MSB and LSB bytes of the register value. For example, if we read register x1B value, the response is 4C 14 01 00 03 2A 82 0D C6 A3 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 C6
Start streaming command
To optimize data throughput a special command is implemented, which will continuously output data from LDC devices to COM port.
To start streaming, send 4C 05 01 00 06 01 29 04 04 30 2A C1. After sending this command it is required to read 32 bytes. 4th byte will indicate an error, if any.
After the stream is initialized, read 32 bytes at a time. An example read:
4C30 0100 092A 0151 42CB 0150 5FFF 1C00 0000 0000 0000 0000 0000 0000 0000 001C
Bytes 7-10 are the Ch0 data (marked in green), MSB 1st, bytes 11-14 are Ch1 data (marked in blue), MSB 1st. In this example, Ch0 data is x015142CB (22,102,731 in decimal), Ch1 is 01505FFF (22,044,671). Further conversion of the raw data to the frequency of oscillation is described in the LDC161x/131x datasheet
Stop streaming command
To stop the streaming, send the command 4C 06 01 00 01 01 D2. After sending this command it is required to read 32 bytes. 4th byte will indicate an error, if any.
CRC-8 check
CRC check is well described in http://en.wikipedia.org/wiki/Computation_of_cyclic_redundancy_checks
Please refer to the link for more detailed information.
The LDC 13xx/16xx EVMs use CRC-8 with polynomial coefficient indices of 8, 2, 1, and 0.
Outlined below is one of the possible implementations:
Convert each byte in the command to an array of Booleans (T = 1, F = 0), MSB being index 1. For example, xA7 becomes an array (T,F,T,F,F,T,T,T).
Concatenate the array of bytes, 1st byte being indices 1-8, 2nd – bytes 9-16 etc. For example, xA70F becomes (T,F,T,F,F,T,T,T,F,F,F,F,T,T,T,T). Record the array size N.
Form C = (T,F,F,F,F,F,T,T,T) – CRC array. Note that the indices of the non-zero coefficients are 8, 2, 1, 0.
Append to the Boolean command array an array of 8 False (F,F,F,F,F,F,F,F) at the end. Denote this array A.
For loop for i=1 to N
IF A[i] = True then
Get B = array A subset starting at index i, length 9
B’ = B XOR C
Replace B in A with B’
End IF
End loop
Take the last 8 Booleans of the updated A, convert it to byte (MSB 1st). For example, if last 8 elements in A are (T,F,T,T,F,F,T,T), it converts to xB3
This is desired CRC-8 check value (ZZ value in the document)
Q4: Do you have any code examples for communicating directly with the MSP430 on the LDC1612, LDC1614, LDC1312, or LDC1314 EVM?
Answer:
Please see below short Pyhon script to read write LDC1614 registers.
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import sys
import collections
import serial
import time
import struct
import msvcrt
from array import *
import binascii
#############################################################################################
# LDC1000 addressing space
LDC1614_DATA_MSB_CH0 = '00'
LDC1614_DATA_LSB_CH0 = '01'
LDC1614_DATA_MSB_CH1 = '02'
LDC1614_DATA_LSB_CH1 = '03'
LDC1614_DATA_MSB_CH2 = '04'
LDC1614_DATA_LSB_CH2 = '05'
LDC1614_DATA_MSB_CH3 = '06'
LDC1614_DATA_LSB_CH3 = '07'
LDC1614_RCOUNT_CH0 = '08'
LDC1614_RCOUNT_CH1 = '09'
LDC1614_RCOUNT_CH2 = '0A'
LDC1614_RCOUNT_CH3 = '0B'
LDC1614_OFFSET_CH0 = '0C'
LDC1614_OFFSET_CH1 = '0D'
LDC1614_OFFSET_CH2 = '0E'
LDC1614_OFFSET_CH3 = '0F'
LDC1614_SETTLECOUNT_CH0 = '10'
LDC1614_SETTLECOUNT_CH1 = '11'
LDC1614_SETTLECOUNT_CH2 = '12'
LDC1614_SETTLECOUNT_CH3 = '13'
LDC1614_CLOCK_DIVIDERS_CH0 = '14'
LDC1614_CLOCK_DIVIDERS_CH1 = '15'
LDC1614_CLOCK_DIVIDERS_CH2 = '16'
LDC1614_CLOCK_DIVIDERS_CH3 = '17'
LDC1614_STATUS = '18'
LDC1614_ERROR_CONFIG = '19'
LDC1614_CONFIG = '1A'
LDC1614_MUX_CONFIG = '1B'
LDC1614_RESET_DEV = '1C'
LDC1614_DRIVE_CURRENT_CH0 = '1E'
LDC1614_DRIVE_CURRENT_CH1 = '1F'
LDC1614_DRIVE_CURRENT_CH2 = '20'
LDC1614_DRIVE_CURRENT_CH3 = '21'
LDC1614_MANUFACTURER_ID = '7E'
LDC1614_DEVICE_ID = '7F'
DEBUG_PRINT_TX_DATA = 0
DEBUG_PRINT_RX_DATA = 0
DEBUG_PRINT_READ_DATA = 0
class crc8:
def __init__(self):
self.crcTable = (0x00, 0x07, 0x0e, 0x09, 0x1c, 0x1b, 0x12, 0x15, 0x38,
0x3f, 0x36, 0x31, 0x24, 0x23, 0x2a, 0x2d, 0x70, 0x77,
0x7e, 0x79, 0x6c, 0x6b, 0x62, 0x65, 0x48, 0x4f, 0x46,
0x41, 0x54, 0x53, 0x5a, 0x5d, 0xe0, 0xe7, 0xee, 0xe9,
0xfc, 0xfb, 0xf2, 0xf5, 0xd8, 0xdf, 0xd6, 0xd1, 0xc4,
0xc3, 0xca, 0xcd, 0x90, 0x97, 0x9e, 0x99, 0x8c, 0x8b,
0x82, 0x85, 0xa8, 0xaf, 0xa6, 0xa1, 0xb4, 0xb3, 0xba,
0xbd, 0xc7, 0xc0, 0xc9, 0xce, 0xdb, 0xdc, 0xd5, 0xd2,
0xff, 0xf8, 0xf1, 0xf6, 0xe3, 0xe4, 0xed, 0xea, 0xb7,
0xb0, 0xb9, 0xbe, 0xab, 0xac, 0xa5, 0xa2, 0x8f, 0x88,
0x81, 0x86, 0x93, 0x94, 0x9d, 0x9a, 0x27, 0x20, 0x29,
0x2e, 0x3b, 0x3c, 0x35, 0x32, 0x1f, 0x18, 0x11, 0x16,
0x03, 0x04, 0x0d, 0x0a, 0x57, 0x50, 0x59, 0x5e, 0x4b,
0x4c, 0x45, 0x42, 0x6f, 0x68, 0x61, 0x66, 0x73, 0x74,
0x7d, 0x7a, 0x89, 0x8e, 0x87, 0x80, 0x95, 0x92, 0x9b,
0x9c, 0xb1, 0xb6, 0xbf, 0xb8, 0xad, 0xaa, 0xa3, 0xa4,
0xf9, 0xfe, 0xf7, 0xf0, 0xe5, 0xe2, 0xeb, 0xec, 0xc1,
0xc6, 0xcf, 0xc8, 0xdd, 0xda, 0xd3, 0xd4, 0x69, 0x6e,
0x67, 0x60, 0x75, 0x72, 0x7b, 0x7c, 0x51, 0x56, 0x5f,
0x58, 0x4d, 0x4a, 0x43, 0x44, 0x19, 0x1e, 0x17, 0x10,
0x05, 0x02, 0x0b, 0x0c, 0x21, 0x26, 0x2f, 0x28, 0x3d,
0x3a, 0x33, 0x34, 0x4e, 0x49, 0x40, 0x47, 0x52, 0x55,
0x5c, 0x5b, 0x76, 0x71, 0x78, 0x7f, 0x6a, 0x6d, 0x64,
0x63, 0x3e, 0x39, 0x30, 0x37, 0x22, 0x25, 0x2c, 0x2b,
0x06, 0x01, 0x08, 0x0f, 0x1a, 0x1d, 0x14, 0x13, 0xae,
0xa9, 0xa0, 0xa7, 0xb2, 0xb5, 0xbc, 0xbb, 0x96, 0x91,
0x98, 0x9f, 0x8a, 0x8d, 0x84, 0x83, 0xde, 0xd9, 0xd0,
0xd7, 0xc2, 0xc5, 0xcc, 0xcb, 0xe6, 0xe1, 0xe8, 0xef,
0xfa, 0xfd, 0xf4, 0xf3)
def crc(self, msg):
runningCRC = 0
for c in msg:
c = ord(str(c))
runningCRC = self.crcByte(runningCRC, c)
return runningCRC
def crcByte(self, oldCrc, byte):
res = self.crcTable[oldCrc & 0xFF ^ byte & 0xFF];
return res
def write_reg(serial_port, addr, data):
crc = crc8()
serial_string = '4C150100042A'+ addr + data
serial_string = serial_string.decode('hex')
crc_byte = chr(crc.crc(serial_string))
serial_port.write(serial_string+crc_byte)
s = serial_port.read(32)
if DEBUG_PRINT_RX_DATA:
print("Read:%s" % (binascii.hexlify(s)))
if (s[3] != '\x00'):
print("Error in write register")
exit()
def read_reg(serial_port, addr):
crc = crc8()
serial_string = '4C150100022A'+ addr
serial_string = serial_string.decode('hex')
crc_byte = chr(crc.crc(serial_string))
serial_port.write(serial_string+crc_byte)
s = serial_port.read(32)
if DEBUG_PRINT_RX_DATA:
print("Read:%s" % (binascii.hexlify(s)))
if (s[3] != '\x00'):
print("Error in set register")
exit()
serial_string = '4C140100022A02'
serial_string = serial_string.decode('hex')
crc_byte = chr(crc.crc(serial_string))
serial_port.write(serial_string+crc_byte)
s = serial_port.read(32)
if DEBUG_PRINT_RX_DATA:
print("Read:%s" % (binascii.hexlify(s)))
if (s[3] != '\x00'):
print("Error in read register")
exit()
data_read = s[6] + s[7]
if DEBUG_PRINT_READ_DATA:
print("Addr:", addr,"Data:", binascii.hexlify(data_read) )
return binascii.hexlify(data_read)
def ldc_config(serial_port):
write_reg(serial_port, LDC1614_MUX_CONFIG, 'C20F')
def main():
serial_port = serial.Serial(port='COM13', baudrate=115200)
device_id = read_reg (serial_port, LDC1614_DEVICE_ID)
print("device_id=%s" % (device_id))
write_reg (serial_port, LDC1614_CONFIG, '0200')
ldc_config (serial_port)
write_reg (serial_port, LDC1614_CONFIG, '0000')
try:
while 1:
# do loop stuff
data_lsb = read_reg (serial_port, LDC1614_DATA_LSB_CH0)
data_msb = read_reg (serial_port, LDC1614_DATA_MSB_CH0)
status = read_reg (serial_port, LDC1614_STATUS)
print("Frequency Counter=%s%s Status=%s " % (data_msb, data_lsb, status))
time.sleep(.5)
except KeyboardInterrupt:
exit()
if __name__ == "__main__":
main()
Q5: Can I connect multiple LDC EVMs to the same computer?
Answer: Yes. The maximum number of EVMs that can be used simultaneously is limited by the number of available USB ports. The procedure for connecting multiple EVMs to the same computer is as follows:
- Connect the desired number of EVMs to the available USB ports.
- Open one instance of the GUI, note down the com port # at the top of the screen. This EVM is the highest priority.
- Remove and replace each EVM individually until the COM port number changes. Note down the COM port number. This EVM is the next highest priority.
- Repeat this process until no EVMs are connected and the EVM with the lowest priority has been identified.
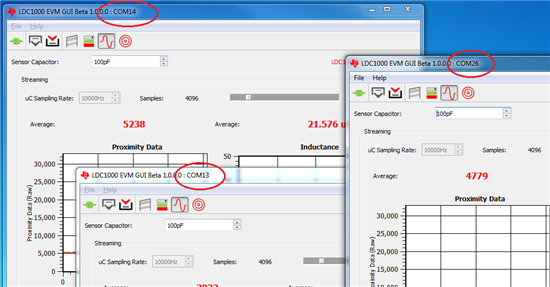
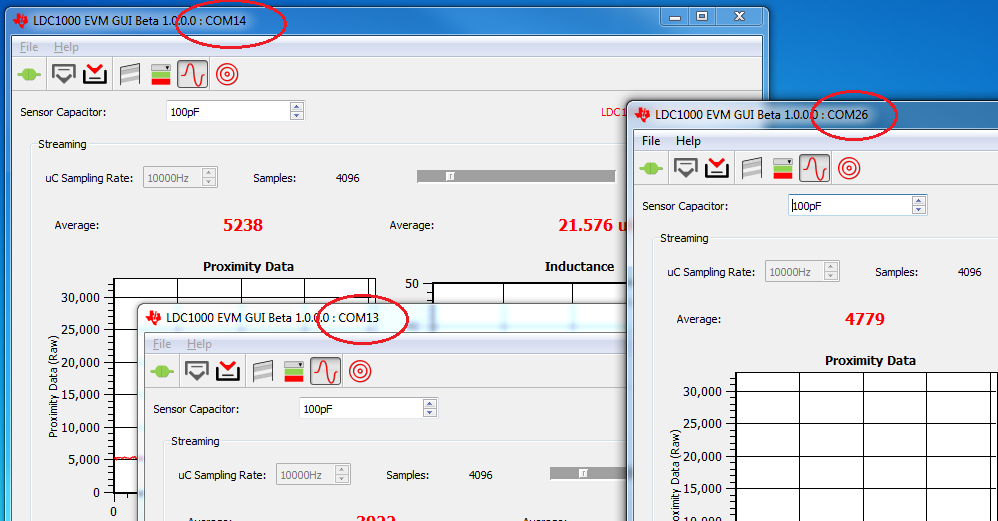
- When all of the EVMs are to be used simultaneously, open one GUI for each EVM and plug in the EVMs from lowest priority to highest priority – they should each claim their own instance of GUI as shown in the screenshot below:
Q6: What does the red LED on the LDC1312, LDC1314, LDC1612, and LDC1614 EVMs indicate?
Answer: The red LED is not an indication of failure. It shows when the measured EVM inductance on either channel differs from the default inductance of the EVM coil.
For example, the red LED may be lit if
- either of the two sensors has been replaced with a custom sensor, or
- the user touches either of the sensor coils while plugging in the EVM, or
- the EVM is plugged in while either of the sensor coils is in the presence of metal.
Q7: What is the maximum target sensing distance?
Answer: For targets with a size comparable to the size of the coil, the following rules of thumb apply
- LDC1612, LDC1614 can sense targets
- up to 200% of the coil diameter
- LDC1000, LDC1041, LDC1051, LDC1312, LDC1314 can sense targets
- up to 50% of the coil diameter (high-precision applications)
- up to 100% of the coil diameter (low-precision applications such as metal presence detection)
- For further information, please refer to this blog post on analog wire.
Q8: I use a rectangular coil. What is the maximum sensing distance?
Answer: The maximum sensing distance is dominated by the short dimension of the coil. Using the short dimension, the same rules of thumb as for circular coils apply.
Q9. I am using a small coil or spring with very low inductance. Can I still use it as a sensor?
Answer: Yes, a series inductor can be added to increase the LC tank impedance. For more details, refer to this Analog Wire blog post.
Q10: Can I use an Inductance-to-Digital converter to measure lateral movement (linear position sensor)?
Answer: Yes you can. As long as distance between coil and target is fixed or known, you can translate lateral movement to an inductance change that can be measured with an LDC. There are two approaches which are discussed in the Analog wire blog:
Q11. How can I design a rectangular, stretched, or racetrack coil?
Answer: These coil types are currently not supported in WEBENCH. We have developed scripts for Altium to draw those coil types. You can download the scripts here.
Q12. Can I multiplex sensors with my LDC device?
Answer: Only for the LDC131x, LDC161x, and LDC1101 devices. Please see this application note for more details.
Q13: I am not using all available PCB layers for my PCB coil design. Should I create a GND plane on the other layers?
Answer: No. It is important to use a keep-out area of at least the coil area on all unused PCB layers. Copper on layers above/below the coil acts as a target, which affects measurements and limits range.
Q14: What is the recommended copper thickness for a PCB coil?
Answer: In general, 1oz copper thickness (1.37mil or 34.8um) is sufficient and recommended for most applications. However, heavier and lighter copper plating also offer advantages in certain applications.
Increasing the copper plating will improve the Q of an equivalent coil, especially for coils operated at low frequencies. However, thicker copper traces cannot be manufactured with the same geometries, so the number of turns in a given area is reduced - and the inductance is correspondingly reduced by the reduction of number of turns squared.
Thinner copper can be used for smaller coils which are operated at higher frequencies (over 3MHz) but the Q will be reduced.
Q15: What are the general guidelines for sensing a target through metal?
Answer: The most important factor is sampling rate.
- Determine the minimum rate for the application.
- Once we have the sampling rate, calculate the minimum LC frequency:
- LC Frequency = rate * 192/3
- From there, calculate the skin depth:
- Skin Depth = 503*sqrt(ρ / (f * µ)), where ρ is resistivity of material to look through, µ is permeability, f is the LC frequency
As an example, consider the following scenario:
- We want to determine the maximum thickness of stainless steel (grade 316) that we can sense through for a turbine with one blade. The blade is 36° wide and rotating at 100 Hz. Using the steps above:
- Sampling rate (using a simple model) = 2 *(360° / width) * frequency of rotation = 2 * (360°/36°) * 100Hz = 2kHz
- LC Frequency = sampling rate * 192/3 = 128KHz
- Maximum thickness we can see through = 503 * sqrt(0.75uΩm / (128kHz *1)) = 1.218mm
Q16: What do I need to consider when using a PCB coil for gear tooth counting?
Answer: When choosing the PCB coil for gear tooth counting application, the rule of thumb is that its diameter has to be equal or less than the gear thickness. The smaller the coil, the stronger the signal. Make the coil as small as practical/possible. Small coil LC tanks will have smaller Rp value, which will define the minimum coil size.
The coil should be located no more than 50% of the coil diameter away from the teeth. The closer the coil, the stronger the signal.
Q17: What is the influence of a motor magnetic field on LDC?
Answer: Motor magnetic fields will have no impact on LDC, if the oscillation frequency of the LDC is set to MHz range. The motor magnetic field frequency is drastically smaller, and thus cannot couple into the LC tank.
Q18: I have several coils in my system. Will my coils interfere?
Answer: In certain circumstances, cross-talk between multiple coils is possible. To avoid cross-talk, ensure that at least one of the following conditions is met:
- keep the center-to-center distance of the coils above 2D, where D is the average coil diameter.
- keep the LC tank frequencies at least 15% apart. For coils with low Q, a larger frequency separation is advised. This can easily be achieved by choosing different sensor capacitor values.
- Place a barrier of metal or ferrite between the coils.
Q19: How can I determine the optimal drive current on LDC1312, LDC1314, LDC1612, or LDC1614 if I don't know RP?
Answer: For best performance, the following procedure is recommended for each channel:
One-time system calibration:
- Move the target to the maximum distance from the sensor
- Set SETTLECOUNT_CHx.CHx_SETTLECOUNT according to the reference clock, sensor frequency, and sensor Q factor
- Enable auto-calibration by setting CONFIG.RP_OVERRIDE_EN to b0
- Set CONFIG.SLEEP_MODE_EN to b0
- Wait until the device has performed at least one conversion for each channel
- Copy the value of DRIVE_CURRENT_CHx.CHx_INIT_IDRIVE into non-volatile memory
Upon power-up:
- For each channel, copy the value of the previously recorded CHx_INIT_IDRIVE setting into register DRIVE_CURRENT_CHx.CHx_IDRIVE
- Disable auto-calibration by setting CONFIG.RP_OVERRIDE_EN to 1
- Disable auto-amplitude correction by setting CONFIG.AUTO_AMP_DIS to 1
Q20: What is the maximum sample rate of the LDC131x and LDC161x?
Answer: The maximum sample rate is limited by the I2C protocal rate. At a 400kHz I2C SCLK, the maximum sample rates are:
| Number of active channels | LDC1312 | LDC1314 | LDC1612 | LDC1614 |
| 1 | 13.3ksps | 13.04ksps | 4.08ksps | 4.08ksps |
| 2 | 4.08ksps | 4.08ksps | 2.04ksps | 2.04ksps |
| 3 | N/A | 2.72ksps | N/A | 1.36ksps |
| 4 | N/A | 2.04ksps | N/A | 1.02ksps |
Note that RCOUNT and SETTLECOUNT also need to be configured to support the above sample rates.
Q21: Why does inductance decrease when ferrous material is near the coil?
Answer: At 3.5 MHz, the magnetic field only insignificantly penetrates the nearby metal, whether it is ferrous or not. Thus, the inductance increase due to field magnification in ferrous material is insignificant.
However, eddy currents are still generated in either case, and they have a negative coupling coefficient with the coil, thus bringing down the inductance of the system.
More information is available here: Why does the inductance go down?
Q22: When I touch the sensor coil, the GUI shows an increase in inductance. Why?
Answer: This is a capacitive effect. The LDC measures the oscillation frequency, which is given by fsensor = 1/(2π * sqrt(L*C)). The GUI uses the sensor capacitor setting and the frequency counter data to calculate inductance. Touching the coil or the wires between the LDC and the coil adds tank capacitance. The actual sensor capacitor therefore no longer reflects the setting in the GUI. Accurate inductance measurements can only be made if the tank capacitance is known and remains constant.
Q23: I am holding a permanent magnet close to coil and can see a decrease in inductance. Is the sensor affected by the magnetic fields of the magnet?
Answer: No. The permanent magnetic field does not interfere with the measurement. However, the conductive material which the magnet is made of acts as a target itself.
Q24: Why do I see spikes in the output of LDC1312, LDC1314, LDC1612, or LDC1614?
Answer: In most cases in which spikes or noise appear in the LDC output as shown in the screenshot, the deglitch function is set incorrectly.
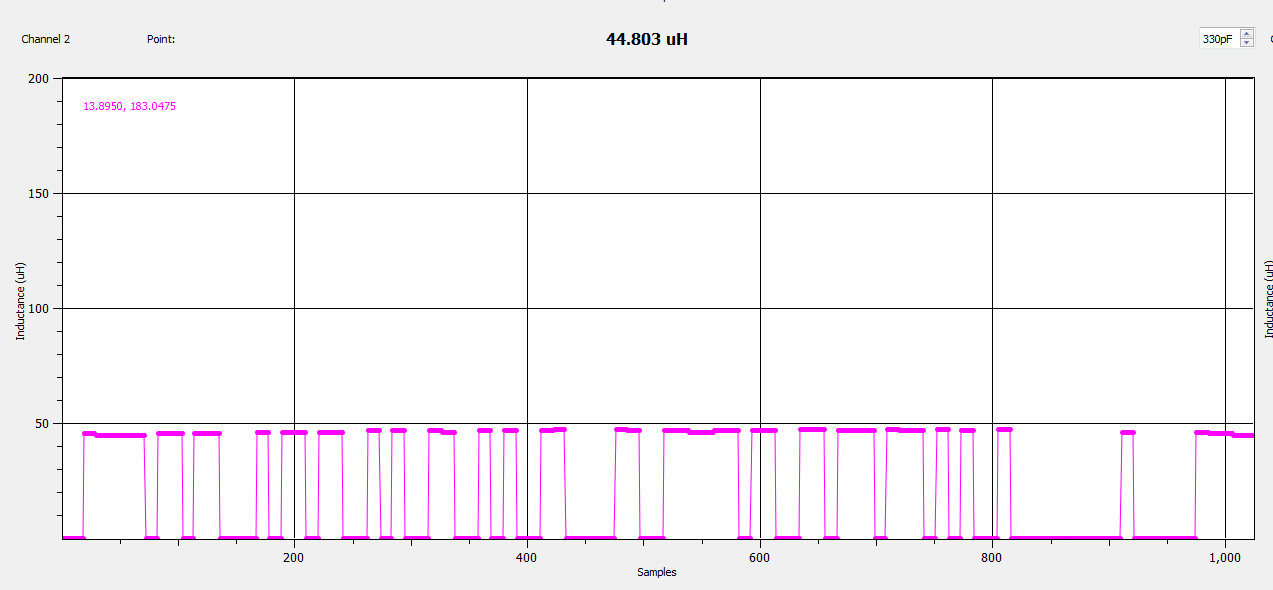
Please ensure that the input deglitch filter is set correctly. This value must be set to the smallest frequency above the oscillation frequency. For example, if you use the EVM sensor which oscillates at 2MHz, then MUX_CONFIG.DEGLITCH should be set to 100b (3.3MHz).
If two sensors oscillate in different frequency bands the following methods are recommended:
- set the DEGLITCH bandwidth to the higher of the bands. For example, if CH0 oscillates at 2MHz (1MHz-3.3MHz band) and CH1 oscillates at 7MHz (3.3MHz-10MHz band), then DEGLITCH should be set to b101 (10MHz cut-off) or
- change the DEGLITCH value before each conversion to the optimal setting for the sensor that will perform the next conversion.

