Other Parts Discussed in Thread: UNIFLASH, IWR1642,
Hello,
I have created a custom PCB that utilizes the IWR1443 sensor for level sensing application. So far, I am able to flash the highAccuracy lab demo to the external flash memory (part# MX25R1635FZNIH0) via UniFlash. Using the CLI commands I am able to execute all of the commands and receive acknowledgement as shown below. However, when I send the command to start the sensor, it fails. Can someone help be start the debug process? I have had two different errors pop up in the Uart output and you can see the CLI commands I am sending below. I'm hoping that someone has run into this same error while developing and point me in the right direction. Thanks!
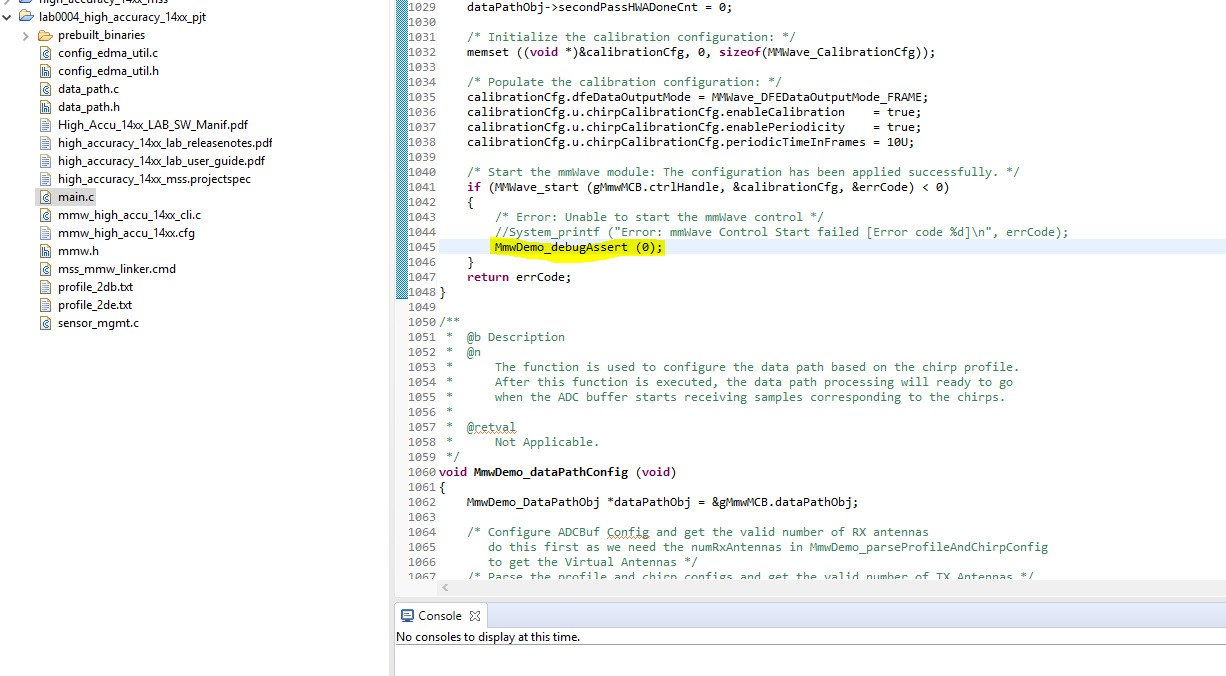
****************************************** xWR14xx MMW Demo 01.01.00.02 ****************************************** mmwDemo:/>sensorStop Done mmwDemo:/> mmwDemo:/>flushCfg Done mmwDemo:/> mmwDemo:/>dfeDataOutputMode 1 Done mmwDemo:/> mmwDemo:/>channelCfg 1 1 0 Done mmwDemo:/> mmwDemo:/>adcCfg 2 1 Done mmwDemo:/> mmwDemo:/>adcbufCfg 0 1 0 1 Done mmwDemo:/> mmwDemo:/>profileCfg 0 77 7 7 130.05 0 0 27.96 1 512 4195 0 0 36 Done mmwDemo:/> mmwDemo:/>chirpCfg 0 0 0 0 0 0 0 1 Done mmwDemo:/> mmwDemo:/>frameCfg 0 0 1 0 500 1 0 Done mmwDemo:/> mmwDemo:/>calibDcRangeSig 0 -5 5 32 Done mmwDemo:/> mmwDemo:/>guiMonitor 1 1 0 0 0 1 Done mmwDemo:/> mmwDemo:/>sensorStart Debug: Init Calibration Status = 0x5fe Exception: ../main.c, line 1045.
****************************************** xWR14xx MMW Demo 01.01.00.02 ****************************************** mmwDemo:/> mmwDemo:/> mmwDemo:/>sensorStop Done mmwDemo:/> mmwDemo:/>flushCfg Done mmwDemo:/> mmwDemo:/>dfeDataOutputMode 1 Done mmwDemo:/> mmwDemo:/>channelCfg 1 1 0 Done mmwDemo:/> mmwDemo:/>adcCfg 2 1 Done mmwDemo:/> mmwDemo:/>adcbufCfg 0 1 0 1 Done mmwDemo:/> mmwDemo:/>profileCfg 0 77 7 7 130.05 0 0 27.96 1 512 4195 0 0 36 Done mmwDemo:/> mmwDemo:/>chirpCfg 0 0 0 0 0 0 0 1 Done mmwDemo:/> mmwDemo:/>frameCfg 0 0 1 0 500 1 0 Done mmwDemo:/> mmwDemo:/>calibDcRangeSig 0 -5 5 32 Done mmwDemo:/> mmwDemo:/>guiMonitor 1 1 0 0 0 1 Done mmwDemo:/> mmwDemo:/>sensorStart Exception: ../main.c, line 1200.