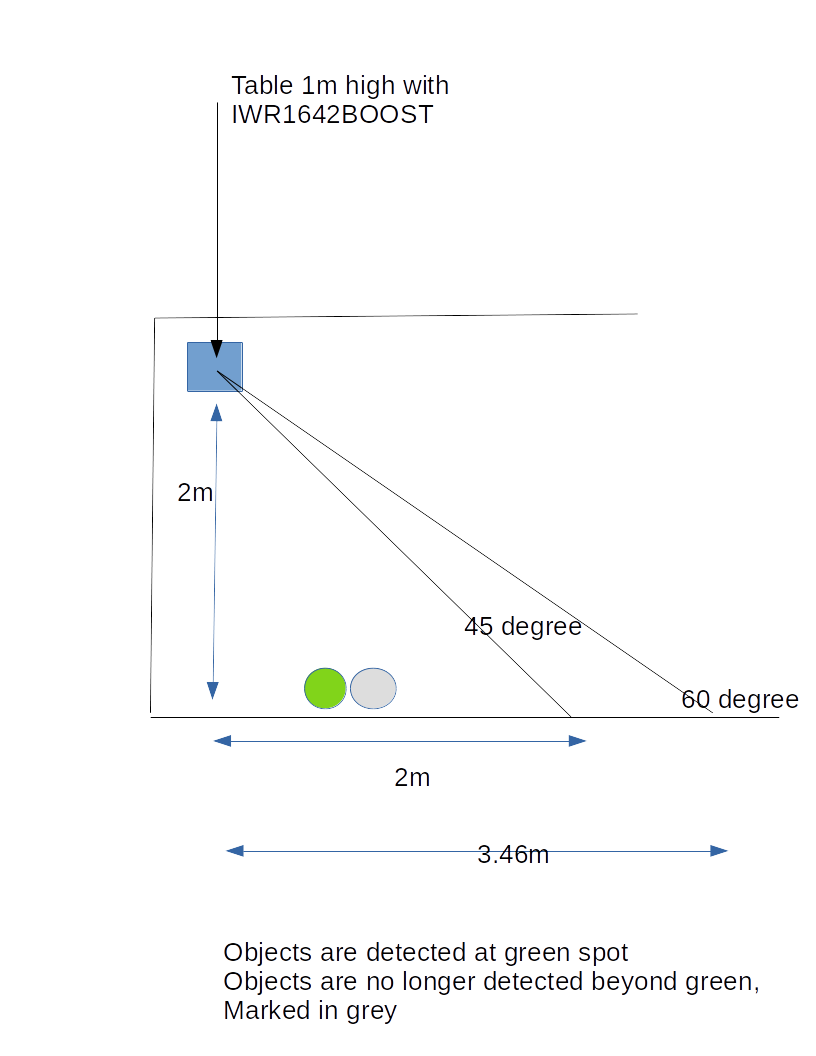
I have the IWR1642BOOST board on a table which is 1m high, please see the image for the wall locations. The azimuth field of view is 60 degree for the board, when I run the demo visualizer, in the XY plot, I don't see any point detections beyond the green spot in the image which is around 90cm, I expect to detect atleast upto 3m in the azimuth axis. I have configured to have maximum range of 15m PLease advise what needs to be done, without increasing the height of the radar location.
The board is at azimuth angle tilt of 0 degrees - it is kept at this angle ON PURPOSE.