Other Parts Discussed in Thread: , ENERGIA, MSP430F5529
Hi,
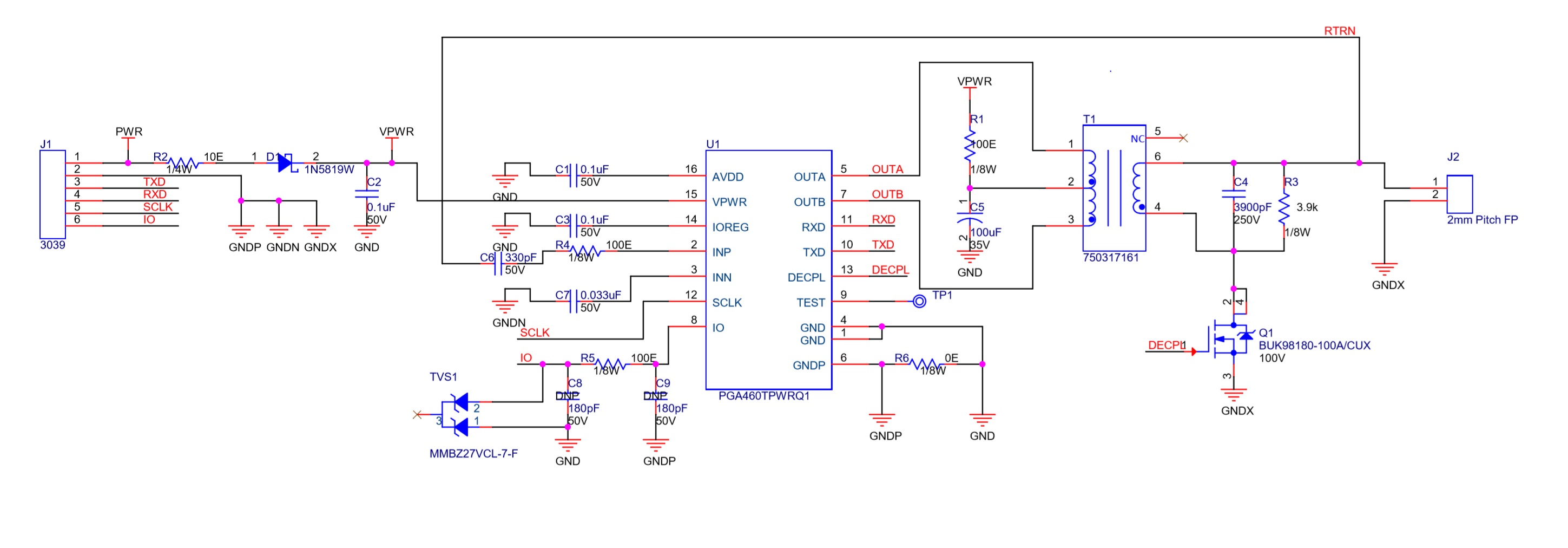
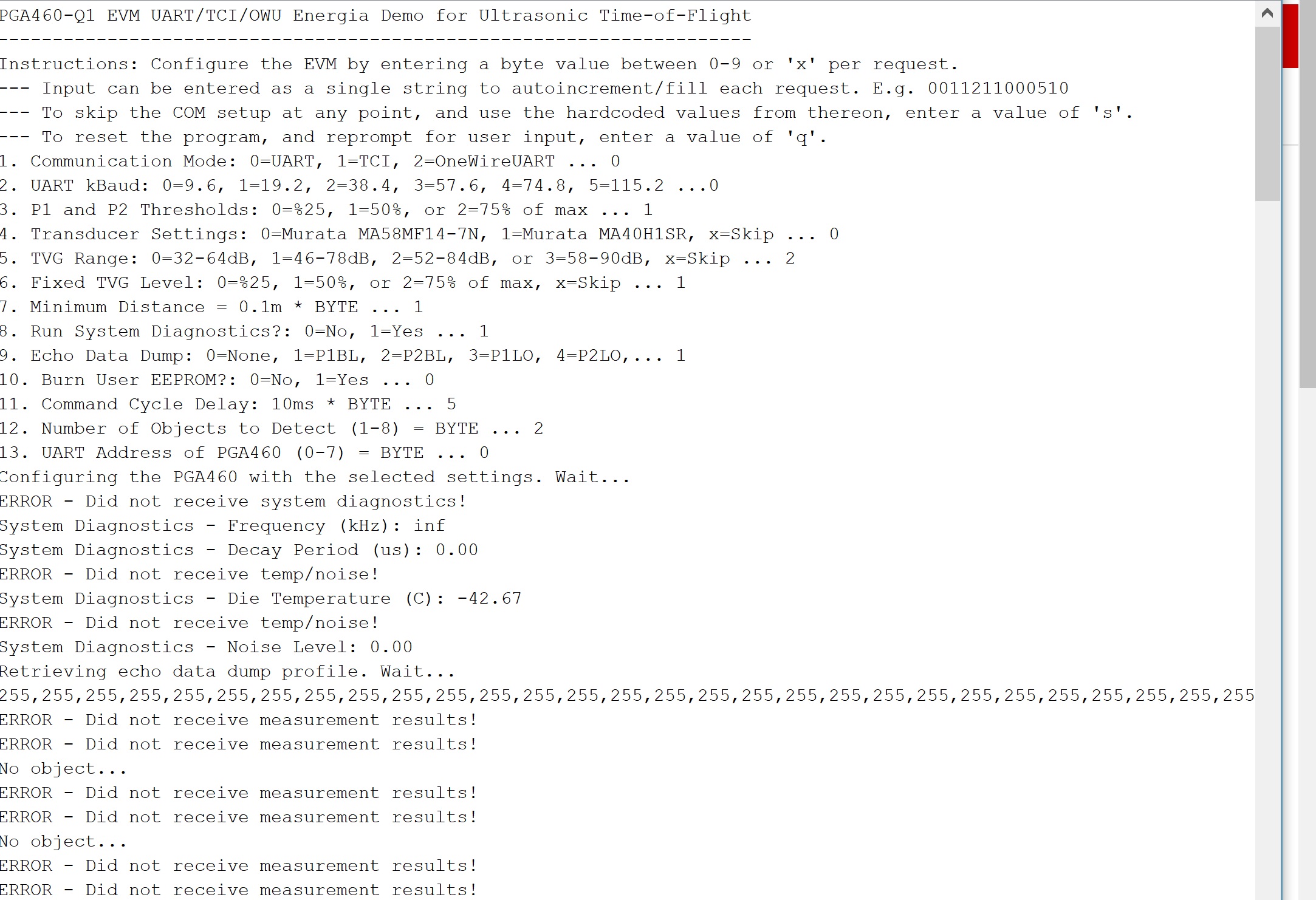
Could you please share me the arduino source code for interfacing the PGA460-Q1.I have designed and developed the ultrasonic sensor module using PGA460-Q1 driver IC and Murata sensor.I would like to inteface this sensor with arduino uno for getting the distance information.Please provide the suitable source code for this
Thanks & regards
Sreejith S V