Hi,
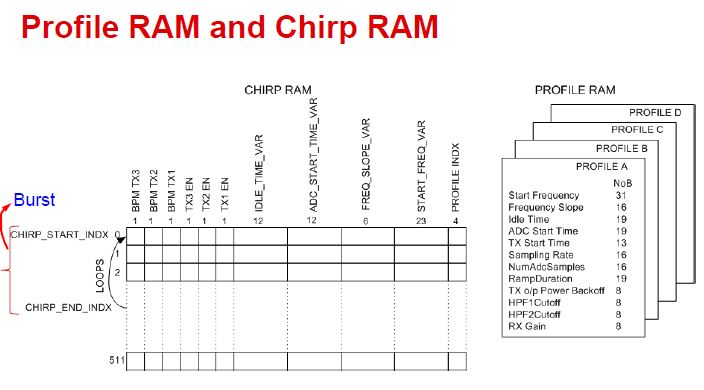
Please provide a technical note on how to program chirp ram and profile for static an dynamic usage.
At run time how to change the chirp parameters, and how to insert a new sub frame ?
Does the arm handles these at run time ?
-ben
Original question:

Hi,
Please provide a technical note on how to program chirp ram and profile for static an dynamic usage.
At run time how to change the chirp parameters, and how to insert a new sub frame ?
Does the arm handles these at run time ?
-ben