Tool/software: Code Composer Studio
Hi,
Currently, I am working on 68xx ISK with the industrial tool box 4.1.0. My requirement is to get the point cloud data of a person and I have to map to concern person accordingly.
I have flashed the pre build binary image from the lab and run oob_parser to collect the data.
Using the below parser code, I am dumping the people count and cloud point data into txt file.
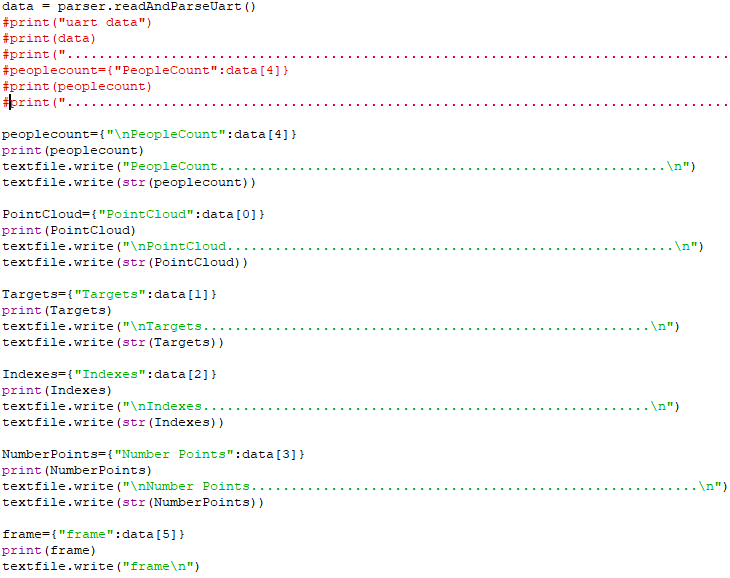
And Every time I got Point Cloud[5] array, even if People count 0,1 or 2. Please see the samples below.
And in sometimes I am able to get proper values in both the indexes of PointCloud array. But not sure which index I have to take it.
Could you please help on the following?
1. How to map people index with point cloud index. People count {Y} = PointCloud[ x ]. How to relate X and Y.
2. How to validate PointCloud[Index] having valid data or junk data.
3. How to retrieve height of the target from the PointCloud [index].
4. Why I am getting PointCloud [5] array
Looking forward your response.
Regards,
Vivek