Part Number: TMS320F28379D
Other Parts Discussed in Thread: LAUNCHXL-F28379D, BOOSTXL-3PHGANINV, 2MTR-DYNO
Hello,
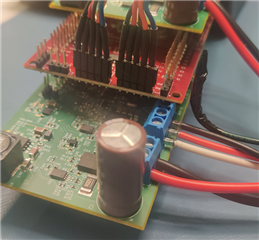
I have a LAUNCHXL-F28379D / two BOOSTXL-3PhGaNInv connected to two Teknic motors(2MTR-DYNO) , I think the exact motor part number is Teknic M-2310P-LN-04K
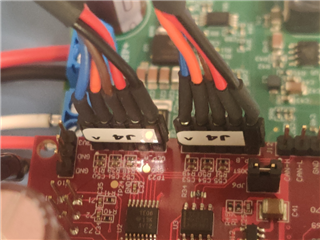
The encoder interface is connected to the launchpad via the J14(QEPA for M1) and J15(QEPB for M2) headers .
We are trying to run the dual axis motor control project mentioned in this document :
I have powered the launchpad via the inverter board(J5 on one of the BOOSTXL-3PhGaNInv) is populated. And Jumpers JP1-JP5 are removed from the LAUNCHXL-F28379D, JP6 is populated for 5v supply.
During testing in Build level 'FCL_LEVEL2' I am able to spin the motor, but I don't see any feedback from the encoder? (motorVars[0].ptrFCL->qep.ElecTheta is always 0)
This is what I have done so far:
1. Set enableFlag to 1.(The motorVars[0].isrTicker counter starts incrementing)
2. Set 'motorVars[0].ctrlState' to CTRL_RUN which sets 'motorVars[0].runMotor' to MOTOR_RUN
3. Set motorVars[0].speedRef to 0.15, Vqtesting to 0.1 and Vqtesting to 0.
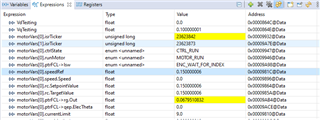
Also motorVars[0].ptrFCL->lsw is always stuck in ENC_WAIT_FOR_INDEX state.
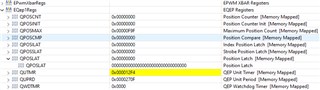
The QPOSLAT register is always 0.
I also physically checked the voltage at the QEPA header, The index pin is always 5v,Should'nt the encoder pull it down to 0 when there is no index?
The above is true for the other motors also.
Thanks