

産業革命4.0の展開に伴い、高度な製造プロセスが世界の市場全体に広がっています。その結果、統合型の製造フローを使用して動作し、プロセス制御データを定期的に収集する、高自動化システムの需要が大幅に増加しています。ロボット・アーム内の磁気エンコーダ、近接センサ、アクチュエータ、高精度トランスミッタ、リニア・モーター、自律型移動ロボットなど、この種のシステムの大半は、高度な位置センシング・ソリューションを必要とします。それらを使用して性能の制御とファクトリ・レベルのデータ収集を実施することで、より的確な決定を下し、より安全で信頼性の高い機器動作を実現できるようになります。
図 1 に示すような自律型移動ロボットは、倉庫全体での物資の輸送のような地道な業務を自動的に実行します。これらの産業用ロボットは、製造フローの最適化、スループットの増加、生産性の向上に役立ちます。ファクトリまたは倉庫のフロア内を安全かつ効率的に移動できるように、自律型移動ロボットは位置センシングや速度制御のような高精度のシステム制御機能をホイール内に搭載する必要があります。
 図1:倉庫のフロア内を移動している自律型移動ロボット
図1:倉庫のフロア内を移動している自律型移動ロボット
位置センシングは、移動や動作を制御する高性能の自動システムでは事実上あらゆる場所に必要とされます。また、位置センシング技術の選定は、システム全体のコストと性能に直接的な影響を及ぼします。位置センシング・ソリューションを評価し、最善の選択肢を判断しようとする場合、センサの精度、速度、消費電力、フレキシビリティ、信頼性を考慮に入れる必要があります。
通常、高精度の自動型産業用アプリケーションにとって、多軸のリニア・ホール効果位置センサが良好なオプションになります。この種のセンサは、高精度、高速、かつ高信頼性の絶対位置測定を実施できるからです。このような能力によって、より高精度のリアルタイム制御が可能になります。機器性能の向上、システム効率の最適化、ダウンタイムの最小化を目指すうえで、このような制御機能は重要な役割を果たします。
自律型移動ロボットの例に戻り、図 2 のブロック図にホイール・モーターとモーター・コントローラの間の帰還ループを示します。ここでは、リニア 3D ホール効果位置センサである TI の『TMAG5170』を使用して、モーターのシャフトの厳密な角度位置とモーター・ドライバを監視し、モーターを回転させます。多くの場合、帰還ループ内にあるすべての素子のうち、このリニア 3D ホール効果センサがシステムの帯域幅とレイテンシに最大の直接的影響を及ぼします。高帯域幅の測定を行う能力のあるセンサを採用することで、この帰還ループ全体の速度を高め、システム性能を向上させることができます。
| リニア 3D ホール効果位置センサの採用でシステム性能を改善 | |
 |
TI のホワイト・ペーパー(英語) で、リニア 3D ホール効果センサや 『TMAG5170』 独自の機能を活用できる各種アプリケーションの詳細をご参照ください。 |
同様に、位置センサの測定精度によって、モーターの動作をどの程度制御できるかが決まります。ただし多くの場合、センサの速度と精度は一方を高めると他方が犠牲になり、システム性能を制限する結果になります。『TMAG5170』 は最大 20kSPS のセンシング速度による高いスループットと、総合誤差の最大値が 2.6% という高精度のリニア測定を実現することで、そのようなトレードオフを不要にしました。
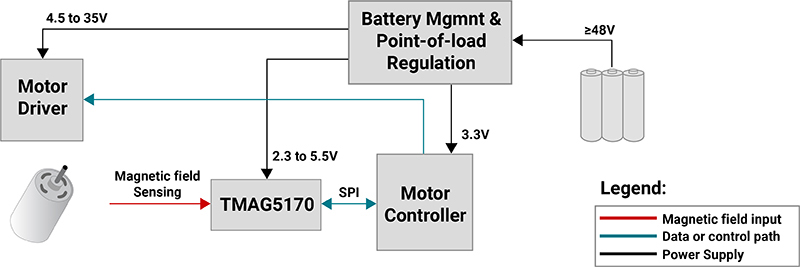 図2:『TMAG5170』 リニア 3D ホール効果位置センサを使用している、
図2:『TMAG5170』 リニア 3D ホール効果位置センサを使用している、
自律型移動ロボットのホイール・モーター・モジュールのブロック図
設計のバッテリ管理システムまたは電源によっては、位置センサを選定するときに消費電力も重要な仕様として考慮する必要があります。ローパワー電源 (4 ~ 20mA のリモート・ループ電源など) を使用するバッテリ動作の各種システムは通常、消費電力とスループットのバランスを最適化するために、ウェークアップ、スリープ、ディープ・スリープのような低消費電力の動作モードを採用しているセンサを必要とします。『TMAG5170』 は複数の動作モードとサンプリング・レートに対応しているので、他の高精度リニア 3D ホール効果センサに比べて電力効率を70% 以上高めることができます。その結果、システム効率を優先事項とするバッテリ動作デバイスや軽負荷モードで、1 ~ 20kHz のサンプリング範囲にわたって消費電力を最適化できます。
位置センサでは多くの場合、機械的構成に関して厳しい制約があります。磁気感度範囲と温度補償に関する複数のオプションを選択できる汎用リニア 3D ホール効果センサを選定することで、磁気系と機械系の設計でフレキシビリティを確保できます。『TMAG5170』 は角度計算エンジンをオンチップ搭載しているので、オフチップ (チップ外部) の処理が不要であると同時に、軸上構成と軸外構成を含め、各種角度センシング・アプリケーションでセンサと磁石の機械的な配置に関するフレキシビリティを確保できます。
自動化業務で各種産業用システムが人間と協調して動作する例が増えているので、安全な動作を保証するための付加的な安全対策の必要性が継続的に高まっているほか、ツールのダウンタイムや品質の問題を防止するための診断機能の拡充も求められています。位置センサの精度、速度、消費電力、フレキシビリティを考慮するのと同様に、位置センサの読み取り値の信頼性について考慮することも重要です。たとえば、診断機能が少ない、もしくは全くないようなセンサを選定すると、センサ・データの精度と信頼性を確保するために多数の外部部品を実装する必要が生じることがあります。その場合、設計の部品表 (BOM) は増加します。『TMAG5170』 は、通信、導通、内部信号パスに関するチェック機能など、一連のスマート診断機能を独自に組み合わせて搭載しているほか、電源、入力磁界、システム温度に関する診断機能を構成可能です。センサ・データの高精度を保証するための付加的な部品は必要ないので、長期的な信頼性向上と部品表 (BOM) の削減を実現できます。
高速で高精度の位置センサは、自動化産業用システムで次世代のリアルタイム制御を可能にします。『TMAG5170』 のような高精度リニア 3D ホール効果センサは、性能を犠牲にせず、消費電力やコストも増やさずに、産業革命4.0 市場のトレンドを推進するために必要な高速、高精度、かつ高信頼性の測定を実現しやすくします。
参考情報:
+アプリケーション・ブリーフ(英語):
“Measuring 3D Motion with Absolute Position Sensors”
+アプリケーション・レポート(英語):
“Angle Measurement with Multi-Axis Linear Hall-Effect Sensors”
+ホワイト・ペーパー:
“エンジニア向け産業用ロボット設計ガイド”
+ホール効果センサの製品詳細
※すべての登録商標および商標はそれぞれの所有者に帰属します。
※上記の記事はこちらの技術記事(2021年10月11日)より翻訳転載されました。
※ご質問はE2E Support Forumにお願い致します。
