

先進運転支援システム(ADAS)は、この5年で、適応型クルーズ・コントロール(ACC)などの快適化機能から緊急ブレーキなどの安全性を実現する機能、歩行者検知や360度センシングのような最新アプリケーションまで、急速な進化を遂げています。これらのアプリケーションを実現していた以前のミリ波センサはすべてがディスクリート・センサであり、トランスミッタ、レシーバ、処理部品が個別のユニットとして使用されていました。このため、ミリ波センサの設計プロセスが複雑化した結果、大型でかさばるものとなっていました。
従来型のシリコン・ゲルマニウム(SiGe)ベースのセンサ・テクノロジというトレンドを断ち切ったTIのRFCMOSベースのレーダ・センサは、デジタルとアナログを高いレベルで融合することにより、高出力電力、低消費電力(市販されている既存のソリューションに比べて50%低い)、低位相ノイズを実現しています。この結果、高精度かつ超高分解能のセンシングが可能になり、より安全で先進的な運転体験が得られるようになっています。
TIのミリ波センサ・ポートフォリオには、AWR 1243、AWR 1443、AWR 1642という3つのセンサ・デバイスが用意されており、設計ニーズに最適なデバイスを開発者が自由に選択できます。
AWR 1xセンサは周波数変調連続波(FMCW)技術に基づき76~81GHzの周波数帯で動作するほか、以下のような特長があります。
- 閉ループのフェーズロック・ループ(PLL)により、距離精度の向上に役立つ、直線性と精度の高いチャープ(周波数スイープ)を実現。
- 4GHzのチャープ帯域幅全体をスイープできるため、5cm未満の間隔で配置された物体を検出可能。
- センサが密集する環境でのジャミングや干渉の検出を可能にする、複合的なレシーバ・アーキテクチャ。
- 各電圧および温度で自己較正を行う、インテリジェント自己監視システム。
長距離および中距離センシング・アプリケーション
自動クルーズ・コントロールを使い、高速道路を���速で走行している状況を想���してください。車の周囲の回避が困難な距離、またはカーブの途中に何らかの障害物が現れた場合、ミリ波センサは数ミリ秒(ms)以内にその障害物を検出できます。想定される危険性への注意喚起のため、その後100ms以内に、中央��インテリジェント・システムが運転者に必要な処置を行うよう警告します。
図1に示すように、AWR 1243ミリ波デバイスは3つのトランスミッタ・アンテナと4つのレシーバ・アンテナを備えたレーダ・フロントエンド・センサであり、自動運転を実現するACCや自動緊急ブレーキ(AEB)のような長距離および中距離レーダ・アプリケーションを対象としています。このデバイスにはカメラ・シリアル・インターフェイス-2(CSI-2)/低電圧差動シグナリング(LVDS)、I2C、シリアル・ペリフェラル・インターフェイス(SPI)が搭載されています。モノリシックミリ波集積回路(MMIC)には較正および監視エンジンが組み込まれており、TI TDA 3プロセッサなどの外部プロセッサと組み合わせて使用します。複数のAWR 1243センサをカスケード接続すると、高速道路での自動運転に利用されるイメージング・レーダのようなアプリケーションで、さらに長距離かつ優れた角度分解能のセンシングを簡単に実現できます。

図1:AWR 1243 ミリ波トランシーバ、距離および視野性能
短距離アプリケーション
Eno Center for Transportationによると、自動車事故の約90%は人為的ミスによるものであり、そのような事故の多くが運転者の注意散漫が原因で発生しています。このような問題への対処を目的としたカメラや24GHzレーダおよび超音波センサが市販されていますが、こうした製品が問題解決に最適とは限りません。TIの77GHzシングルチップ・デジタル信号プロセッサ(DSP)内蔵ソリューションは、この状況を変えることができます。TIのミリ波センサは、日中、夜間、雪、雨、霧、ほこりなど、どのような環境条件でも動作し、小さなフォーム・ファクタと低消費電力で高精度測定を実現できます。
TI AWR 1642センサには、24GHzセンサと比較して以下のような特長があります。
- フォーム・ファクタが33%縮小
- 消費電力が50%低下
- 距離精度が10倍に向上
- コスト面で最適化された部品表(BOM)
図2に示すように、AWR 1642は2つのトランスミッタ・アンテナと4つのレシーバ・アンテナを備えたハイエンドのシングルチップのミリ波センサであり、死角検知、車線変更支援、クロス・トラフィック・アラート、アイドリング・ストップなどの短距離および超短距離アプリケーションを対象としています。このセンサには、CAN、CAN可変データ・レート(CAN FD)、SPIの各インターフェイスに加え、1.5MBのオンチップRAMが搭載されています。ARM® Cortex®-R4FとTI C674x DSPはデータ処理を担います。
HIL(Hardware-in-the-Loop)インターフェイスを備えているため、現場で収集した未加工のアナログ/デジタル・コンバータ(ADC)データをセンサに帰還させることができ、データ・パスの分析やアルゴリズム開発に役立ちます。CAN/CAN FDインターフェイスを介してエンジン制御ユニット(ECU)に送信される物体データや未加工データは、暗号化アクセラレータによって暗号化されます。
ARM Cortex-R4Fでは、車載オープン・システム・アーキテクチャ(AUTOSAR)や、クラスタリングおよびトラッキング・アルゴリズムを実行できます。高速フーリエ変換(FFT)や物体検出のような信号処理集中型のアプリケーション向けには、C674x DSPで固定小数点演算と浮動小数点演算の両方を実行できます。

図2:AWR 1642シングルチップのミリ波センサとその距離および視野性能
超短距離アプリケーション
駐車支援、着座検出、車のドア/トランク・オープナー、シンプル・ジェスチャ動作などの近接センシング・アプリケーションの実装は、現在、および将来の自動車設計においてますます重要になっています。
AWR 1443は、このようなアプリケーションに利用できる、77~81GHzの高度に統合されたレーダ・デバイスです。以下の図3に示すAWR 1443デバイスは、3つのトランスミッタと4つのレシーバに対応したmmWave RFとアナログ・ベースバンドのシグナル・チェーン全体を備え、フロントエンドの自律型動作を実現するために、お客様側でプログラム可能なARM Cortex R4Fと0.5MBのオンチップ・メモリを搭載しています。
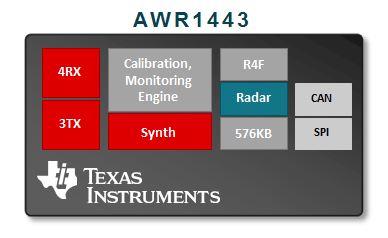
図3:AWR 1443シングルチップ・センサ
開発キット
レーダ・ソリューションの開発に着手する場合、TIでは3つのデバイスすべてに対応した評価モジュール(AWR 1243BOOST、AWR 1443BOOST、AWR 1642BOOST)と、リファレンス回路図、レイアウト、BOMを提供しており、独自の評価ボードを短時間で構築できます。
現在市場で提供されている最高精度のミリ波センサについて詳細をご確認ください。
- TIのホワイト・ペーパーを読む
- AWRポートフォリオのページにアクセスして詳細を確認する
- 短距離レーダのTI Designリファレンス・デザインで開発を開始する
上記の記事は下記 URL より翻訳転載されました。
*ご質問は E2E 日本語コミュニティにお願い致します。
