

ペドロ・へラベルト(Pedro Gelabert )、 V. パスカル・ネルソン(V. Pascal Nelson)
テキサス・インスツルメンツ・インコーポレーテッド
実際の対象物を3次元表示する需要が高まり、多くの新技術が登場しています。特にマシンビジョンやロボティクスは、正確で適応可能な3次元キャプチャ機能を備えています。他にも3Dスキャナは、バイオメトリクス(生体認証)やセキュリティ、産業用検査装置、品質管理、医療、歯型構築、プロトタイピングなどにも応用されています。
3Dスキャナ技術は、対象物の表面を抽出し、物理計測をデジタルで表現します。データは対象物の外側表面を表すXYZ座標からなるポイント・クラウドとして捉えられます。3Dスキャン解析は、対象物の表面積と体積、トポロジー、形状、特長的な寸法を決めます。
3Dスキャナには、対象物の表面の各点への距離を測るための「プローブ」が必要です。原理的には、プローブは物理的に接触します。しかし、多くのアプリケーションでは非接触測定を必要とします。光を使って対象物をプローブする光学技術は、この問題を解決するソリューションを提案します。一つの方法は、多くの場合計算負荷が高く、周囲光の状態にも影響される立体的な視野技術をもたらすために少なくとも2台のカメラを利用する方法、また別の方法として、構造化照明パターンを使うやり方があります。これは、光のパターンを作るためのプロジェクタ1台と、カメラ1台、適度な演算力が求められるアルゴリズムだけで済みます。
構造化光
構造化光は、数学的に構成された光のパターン・セットを投影する3Dスキャンの光学的手法です。これは測定対象物を連続的に投影する方法です。プロジェクタから既知の位置にカメラを置き、照射された対象物の一連の画像を同期しながらキャプチャしていきます。キャリブレーションのために使われるフラットな基準面に対して、カメラで撮られたパターンは、スキャンされた対象物の形状によって歪められます。幾何学的な三角測量の原理を使って、スキャンされた対象物表面上の各点のXYZ座標を計算することができます(図1)。この結果、ポイント・クラウド・データは、スキャンされた対象物表面の詳細な3Dモデルを計算するために使われます。
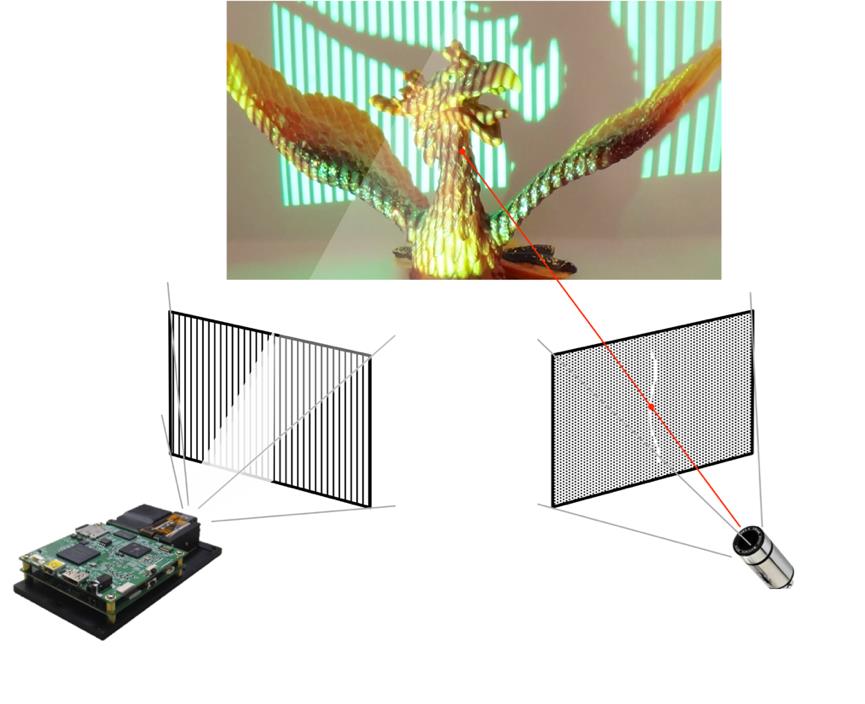
図1:DLP®技術を使った構造化光
プログラマブルな構造化光
プログラマブルなパターンスキャナは、レーザあるいはデジタル空間光変調器(SLM)を備えたLED照明を使い、対象物体表面に一連のパターンを投影します。プログラマブルな構造化光スキャナは、周囲光の状態と対象物の表面および対象物の光反射特性に応じてパターンを適応させるだけでなく複数のパターンを使うことにより精度を上げることができます。
プログラマブルな構造化光は、複数のパターン表示を必要とするため、空間光変調器はスキャナの重要なコンポーネントです。既に市場に出ている空間光変調技術の例として、テキサス・インスツルメンツのDLPテクノロジ、特に『DLP6000』と『DLP 9000チップセット』があります。
異なる構造化光スキャニング・アルゴリズムでは、バイナリおよびグレースケールパターンの一方または両方を生成するSLM機能を必要とします。高コントラストは様々な対象物の反射率と周囲光の状態を扱う際、精度やロバスト性の最大化に役立ちます。システム設計では、サイズや冷却方式、電池への需要によって、光学的なスループットとエネルギー効率を優先します。
3D構造化光を最適化するための技術は多数あります。特に有効な方法は、適応型パターン・セットです。アルゴリズムによってパターンと波長の最良の組み合わせが決まり、それによってスキャンされた対象物の解像度は改善します。色(光の波長)の変更も、対象物の色によって選択できます。適応型パターンは、複雑な表面の形状や不連続な部分がある対象物をスキャンする精度を向上させます。
設計上の配慮
プログラマブルな構造化光ソリューションで、設計上考慮しなければな���ない重要な点がいくつかあります。測定対象物のサイズと距離、さらに3D測定の所望の空間精度によって、SLMとイメージ・キャプチャ・カメラに要求される性能特性が決まります。加えて、SLM解像度(画素数)とスキャン・フィールドのサイズ(画素数/mm)が達成可能な精度を決定します。カメラはサンプリング理論から十分な解像度、通常少なくともSLMの4倍の画素密度を備えている必要があります。
スキャン中、対象物が少しでも動くとデータがぼやけ、測定精度が低下します。対象物が予想よりも速く動くものなら、適切な3D精度のレベルを達成するために、より速くスキャンを終了させなければなりません。スキャン速度が早いほど、空間光変調器の高速化や高いキャプチャ・フレーム・レートのカメラが必要となり、より明るいパターン照明が得られるようになります。毎秒数枚~数百枚のパターン速度が様々な3D測定システムに必要となります。
結論
マシン/ロボット・ビジョンやその他の3Dアプリケーションを使うことで、インテリジェント・マシンはさらに高度な性能を備えることができます。3Dスキャナ技術は、新技術とアルゴリズムの発展と共に進化してきました。コストを抑えながらプロセッシングとセンサの性能が向上することで、これらの新技術は、エンドユーザに複数の選択肢を与えます。構造化光を利用する、アクティブで非接触の3Dスキャナ・システムは、素晴らしいメリットをユーザにもたらしますが、特定のアプリケーションのニーズに基づいて評価される必要があります。
参考文献
Geng, Jason: Structured-light 3D surface imaging: a tutorial
Koninckx, Thomas P. and Gool, Luc Van: Real-Time Range Acquisition by Adaptive Structured Light
※DLPはTexas Instrumentsの登録商標です。その他すべての商標はそれぞれの所有者に帰属します。
※『2016年3月25日マイナビニュース掲載のテキサス・インスツルメンツ寄稿記事を転載』
