

シングルチップのレーダ・ソリューションにより、ハードウェアおよびソフトウェア設計が簡素化され、参入障壁が低下
交通システムは、世界中で人や貨物をすばやく効率的かつ安全に運ぶために不可欠なものです。したがって、交通システムおよび関連インフラストラクチャは、道路やその周辺のデータを収集し状態を検知することで、長期的およびリアルタイムの変化に対応する必要があります。交通関連のエンジニアは、このデータを使用して統計情報を構築し、将来のインフラ投資の計画に役立てることができ、ドライバーはこのデータを利用して適切なルートを走行することができます。
インテリジェントな交通システムの市場は2022年までに636億ドルを超える見込みであることから、この情報の価値は明白です。しかし、交通監視システムがさまざまな条件下で輸送の効率と安全性を高める能力を提供する一方、設計者は以下のようなさまざまなセンシングの課題に直面しています。
- 位置および速度の管理:交通データが有用であるためには、交通の場所(位置)と流れ(速度)の両方に関する知識を提供する必要があります。これには、交差点の停止線からの距離や近づいてくる車両の速度などが含まれます。
- 全天候運���:交通インフラのセンサは屋外に設置されることが多いため、どのような天候でも機能する必要があります。日中と夜間の両方に加え、雨、雪、霧、塵などの悪天候でも一貫して機能することが求められます。
- 長距離からの高速物体検出:センサは、より高速で動く交通状況を、より長い距離から検出および測定できる必要があります。例えば、システムが交差点から遠く離れた車両を検知できれば、以降の交通状況を見越して青信号や黄信号の時間をより適切に制御できます。
- 正確で高性能な測定:車両の車線位置、センサからの距離、および速度を正確に理解することは、交通監視インフラの効果的な運用のために不可欠です。
今日の交通監視テクノロジー
現在、交通監視アプリケーションにはさまざまなセンシング・テクノロジーが使用されています。これらは市場でそれぞれ異なる機能を提供し、独自の長所と短所があります。
- 誘導性ループ・センサ:このソリューションでは、周囲から絶縁された導線が道路上の複数の溝に配置されています。この導線に電気的パルスが印加されると、車の通過によってインダクタンスが変化するため、車両がその場所に停まっている、またはそこを通過したことが示されます。一般的に使われ、よく理解されている反面、誘導性ループ・センシングにはいくつかの短所があります。
まず、検出対象がループの設置場所周辺の“存在”に限定されるため、前方から接近する交通量を予測することは困難です。また、システムのスケール的に、交差点で各ゾーンおよび車線にそれぞれ独自のループが必要になるため、コストが高く、システムの実装が複雑です。
しかしおそらく、最も大きな問題は、これらのシステムを設置または修理する際に、路面の掘削が必要になることです。加えて、これらのシステムが多くの場合、短い保守サイクル(1~2年)を要することから、誘導性ループ・システムの全体的なコストは短期間に増大します。
- カメラおよびビジョン・ベースのセンサ:カメラおよびビジョン・ベースのセンサは、ビデオ・イメージ・プロセッサを使用して、CMOSカメラ・センサからのイメージ・データをキャプチャします。次に、このイメージが分析され、交通状況が判定されます。
これらのシステムは、交差点や高速道路の交通状況を測定するだけでなく、オペレータにライブ映像を伝送するための強力なツールとなります。
ただし、昼夜のサイクル、影、悪天候など、環境条件の変化によって、これらのシステムの“見る”能力は直接影響を受けます。また、そのような視覚上の課題によって、高度な信号処理およびアルゴリズムが必須となり、システムの複雑度が大きく増大します。
ミリ波レーダ・ベースの交通監視
レーダ、とりわけミリ波によるものが交通監視の一つの技術として注目されつつあります。ミリ波の特有の長所として、光や天候に左右されず、ビジョン・ベースのテクノロジーに比べて長距離からの検出が可能で、精度も向上しているため、交通監視アプリケーションで非常に優れた性能を発揮します(図1)。

図1:ミリ波センサは通常、道路脇のポールに設置され、道路状況の影響を受けない
交通管理システムが直面するセンシング上の課題において、ミリ波レーダは輸送効率や安全性をさまざまな方法で向上させることができます。
- あらゆる天候状況で動作:レーダ・アプリケーションやRF信号の伝播に詳しい方であれば、レーダが環境条件の変化に影響されないことをご存知でしょう。ミリ波には、夜間、煙、霧、雨といった悪天候条件でも正常にセンシングできる能力があります(図2)。そしてこの能力によってミリ波センサは、変化する自然環境での屋外センシング向けに堅牢で一貫したソリューションを提供します。

図2:ミリ波センサは天候条件に関わらず長い距離から車両を検出可能
- 高速移動体を広範囲に検出:ミリ波センサは、従来のレーダ・システムとの比較で数々の利点を持つ77GHz帯の高速周波数変調連続波(FMCW)レーダです。77GHzレーダ・システムは、アンテナ設計とRFチャープ構成の組み合わせにより、150m以上離れて100km/h以上で走行する車両を含め対象物を容易に検出します。
- 物体測定の精度:演算処理を内蔵した高速FMCWレーダは、視野に含まれる多くの反射対象物の距離、移動速度、角度を1秒間に複数回測定できます。それにより、ミリ波ソリューションを使用した交通監視システムは、複数の車両をリアルタイムで、高いレベルの距離および速度分解能で簡単に識別および追跡できます。
レーダ設計における課題への対処
しかし、レーダ・ソリューションの実装にはいくつかの課題もあります。現在のレーダ・ソリューションでは、完全なソリューションを作成するために複数のディスクリート部品が必要です。これには、RFフロントエンドやデジタル処理バックエンドが含まれます(図3)。
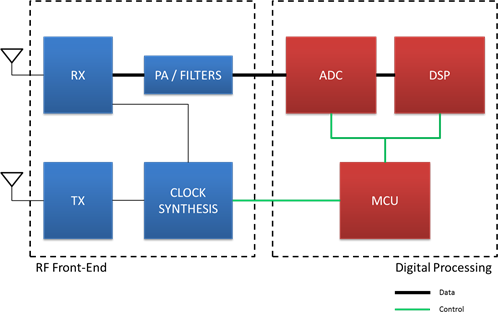
図3:RFフロントエンドおよびデジタル処理バックエンドに個別のチップを使用したディスクリートミリ波レーダ設計の概要
ディスクリート・レーダ・システムでは、MCUなどの中央処理装置からすべてのディスクリート部品への制御信号の誘導による電磁干渉(EMI)のため、「noisy」なシステムになりかねません。
また、統合を欠くことで設計の複雑度が増し、システムのサイズ、コスト、消費電力が増加します。さらに、ディスクリート・レーダ・システムでは、条件やアプリケーションのニーズが多岐にわたることでソフトウェアに関する課題も生じます。
76GHz~81GHzの周波数帯で動作する新しいミリ波ソリューションは、Armコアの強力なMCUをDSPとともに統合することで、これらの課題に対処しています(図4)。これらのシングルチップ・ソリューションでは、ディスクリートのフロントエンド、A/Dコンバータ、プロセッサの間で高速データ転送を行う必要がありません。
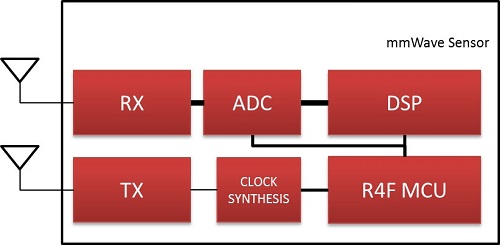
図4:ミリ波レーダ・センサのハードウェアおよびソフトウェア設計を単純化するシングルチップ・ソリューション
処理チェーンがDSP上にだけ実装される一方で、Armプロセッサによって、追跡ロジック、物体の分類、交通統計レポート、I/O機能、センサ管理などの高度な処理および管理機能が実行されます。
物体の検出と追跡は、交通環境を把握し分析するための重要なステップであることに留意してください。また、このシングルチップ・ソリューションには、物体の検出、追跡、分類のためのリアルタイム・インテリジェンスを提供する高度なアルゴリズムも搭載できます。
DSPが物体のクラスタリングおよび追跡アルゴリズムを実行して、車両がどのように動いているかのデータを処理した後、MCUが動的な交通状況に対してインテリジェントにリアルタイムで応答できます。また、シングルチップ・ソリューションではアプリケーションのサイズ削減も容易であり、視野内の物体の距離、速度、角度を正確に測定できます。
結論
ミリ波センサは独自の機能および能力により、センサ・エッジで高性能な検出と分析を可能とするため、スマート交通監視アプリケーションへの最適な選択肢となります。また、シングルチップ・ソリューションによって、ミリ波センサ設計への参入障壁も低くなります。
著者紹介
KEEGAN GARCIA
テキサス・インスツルメンツ
マーケティング・マネージャー レーダ・解析プロセッサ事業
※すべての商標および登録商標はそれぞれの所有者に帰属します。
* ご質問はE2E 日本語コミュニティにお願い致します。
