


유로 신차 평가 제도(NCAP)는 최근 신차의 운전자 지원 기능을 개선하기 위해 레이더 표준을 업데이트했다.
NCAP 표준은 지역에 따라 상이한데, 미국의 NCAP는 NHTSA라고도 불리는 미국 도로교통안전국(National Highway and Traffic Safety Administration)에 의해 관리되며 글로벌 NCAP는 중앙 집권적 단체이다. 그러나 모든 단체들은 ‘더 안전한 자동차와 운전을 위한 표준 확립’이라는 동일한 목표를 가지고 있으며, 소비자가 신뢰할 수 있는 정보에 입각해서 신차 구매 결정을 내리는 데 도움이 되도록 별 0~5개의 형태로 등급을 제공하고 있다.
많은 경우 유로 NCAP는 전 세계 자동차 산업의 기준을 높이는 표준을 최초로 확립했다. 최신 규정인 제79호는 사각지대 감지와 차선 변경 지원에서 레이더의 최소 거리 및 작동 속도를 지정하고 있다.
레이더의 경우, "최소 거리 및 최소 작동 속도"(섹션 5.6.4.8) 섹션은 레이더로 지원할 수 있는 최소 거리(Srear)와 함께 ACSF의 Category C로 차선 변경을 조작할 수 있는 최소 작동 속도 Vsmin을 알아내는 데 도움이 된다.
즉, LCM을 수행하는 ACSF Category C의 경우, 사각지대 감지 레이더 센서가 최소 작동 속도 20km/h에서 얼마나 먼 거리까지 감지할 수 있는지 파악할 수 있다.
더 안전한 차선 변경
안전 차선 변경 기동이란 접근 차량이 두 차량 사이의 안전한 주행 거리를 보장하기 위해 반응(감속)할 수 있는 충분한 시간을 두는 것을 말한다. 특히, R79 규정(섹션 5.6.4.7)은 두 차량 사이의 거리가 자차(ego-vehicle)가 1초 동안 이동하는 거리보다 작지 않도록 하려면, 차선 변경 조작이 시작되고 0.4초 후 변경대상 차선에서 접근 차량이 3m/s²보다 빠르게 감속해야 할 경우 자차의 차선 변경 조작이 매우 중요하다고 정의하고 있다.
접근 차량의 거리와 속도, 그리고 자차의 속도를 알면 차선 변경 시작 시 두 차량 사이의 임계 거리 Scritical(섹션 5.6.4.7.1)을 계산할 수 있다. 조작 시작 시 두 차량 간의 거리가 Scritical 미만인 경우 차선 변경 조작이 허용되지 않는다. 아래 그림 1은 자차의 속도 함수인 Scritical을 보여준다. 자차 속도가 20kmph인 경우 임계 거리는 180m에 가깝다.
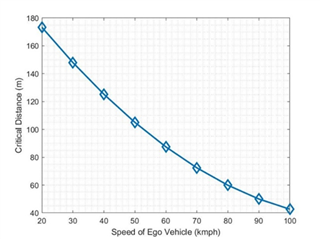
그림 1: 안전한 임계 차선 변경에 필요한 거리와 속도 표시
따라서 접근 차량을 감지하고 거리를 예측하는 것이 효과적인 차선 변경의 핵심이다. 규정의 섹션 5.6.4.8에 설명된 대로 모든 제조업체는 차량이 인접 차선의 후방에서 접근하고 있다는 것을 안정적으로 감지할 수 있는 최소 거리(Srear)를 명시해야 한다(규정상 Srear 테스트 시 이륜차를 사용해야 함). 이 규정에서는 명시한 Srear에 따라 그림 2와 같이 접근 차량이 Srear 거리에서 130km/h의 속도로 접근할 때 자차로 차선 변경을 할 수 있는 최저 속도에서 계산한 최소 작동 속도(Vsmin)를 정의한다.

그림 2: NCAP 규정에 나온 속도 및 거리에 대한 설명 (이미지 출처: UN 규정 제79호)
인접 차선에서 접근 차량이 자차로 감지되지 않을 경우 규정에서는 Srear 거리에서 130km/h의 속도로 감지되지 않은 접근 차량이 있다는 최악의 상황을 가정한다. 이 상황에서는 Vsmin 미만의 속도에서 차선 변경이 허용되지 않는다. 그러나 자차가 Srear보다 짧은 거리에서 접근하는 물체를 감지할 경우 문제가 없다고 판단되면 (즉, 접근 차량과 자차 사이의 거리가 5.6.4.7.1에 정의된 대로 Scritical을 넘을 경우) Vsmin보다 느린 속도로 차선을 변경한다.
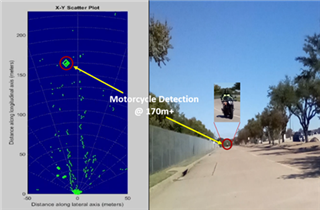
그림 3: 170m 이상 거리의 오토바이 감지
TI의 AWR2944는 차량 제조업체가 NCAP 안전 요구 사항을 충족할 수 있도록하는 업계 최초의 단일 칩 코너 레이더 센서로, 기존의 3번째 트랜스미터보다 33% 더 높은 해상도 구현하기 위해 4번째 트랜스미터로 동급 최고의 RF 성능과 레이더 성능을 제공한다.

그림 4: 200m 이상 거리의 차량 감지
코너 레이더용 TI mmWave 레이더 센서로 NCAP 요구 사항 충족
자동차에 장거리 고해상도 레이더를 장착하면 원거리 감지 기능을 통해 다가오는 차량을 더 빠르게 감지하여 안전하게 차선을 변경하고 교차로를 탐색할 수 있다. TI의 코너 레이더는 차량 제조업체들이 최신 NCAP 안전 요구 사항을 충족할 수 있도록 지원함으로써 더 안전한 도로를 만들 수 있다.
추가 자료:
- AWR2944 제품 폴더
- 하이엔드 코너 레이더 레퍼런스 디자인
- AWR2944 평가 보드 구매
- AWR2944 샘플 주문
배빈 카아라디(Bhavin Kharadi), TI 차량 제품 마케팅팀 소속
