

소비자는 자신의 주변을 둘러싼 환경에서 동작하는 시스템들과 매일 상호 작용한다. 차량에서는 액셀러레이터 페달을 밟으면 차량의 속도는 지연없이 자연스럽게 가속된다.
차량의 가속과 같은 예시를 본 기고 주제에 적용해 본다면, 차량이 하나의 시스템이 될 수 있고 주변 환경은 엑셀러레이터 페달을 밟는 이후 차량 속도가 출력되는 시스템을 “실시간 제어”로 적용될 수 있다.
실시간 제어란, 폐쇄 루프 시스템이 데이터를 수집하고 그 데이터를 처리하고 시스템을 지정된 시간 내에 반영해서 업데이트하는 능력을 가리킨다. 시스템이 이 지정된 기간을 놓치면 그 안정성과 정밀성 및 효율성이 저하된다. 제어가 약해지면 시스템 성능에 해가 될 수 있으며, 가령 필요한 속도에 이르지 못하거나 심지어 과열을 일으킬 수도 있다. 본 기고문에서는 실시간 제어 시스템의 기능 블록에 대해 설명하고 로보틱스 응용 분야의 예시를 다룰 예정이다.
시스템 제어에 반드시 관련되는 것은 아니지만, 다른 시스템 구성 요소와의 통신은 메인 제어 루프와도 공존해야 한다. 실시간 제어에 관련된 주 기능 블록은 감지(데이터 수집), 제어(데이터 해석 및 사용), 구동(시스템 업데이트)이다(그림 1).

그림 1: 실시간 제어 루프의 주 기능 블록
이러한 구성 요소를 더 자세히 살펴보면 다음과 같다.
- 감지는 전압, 전류, 모터 속도, 온도 등 외부 요인의 측정을 나타낸다. 이러한 주요 매개변수는 특정 시점에 발생하는 신뢰할 수 있는 데이터를 시스템에 제공하기 위해 정확하고 정밀한 측정을 필요로 한다.
- 중앙처리장치(CPU)는 다음 출력 명령을 계산하기 위해 들어오는 데이터에 제어 기술을 적용한다. 높은 처리 능력을 가진 C2000
 실시간 MCU, Sitara Arm® 기반 MCU, 통합 브러시리스 DC 모터 드라이브, DC/DC 컨트롤러 등의 마이크로컨트롤러(MCU) 또는 컨트롤러는 시스템이 최소한의 기간을 충족하도록 보장할 수 있는데, 보통 수마이크로초에서 몇 밀리초 이내가 된다.
실시간 MCU, Sitara Arm® 기반 MCU, 통합 브러시리스 DC 모터 드라이브, DC/DC 컨트롤러 등의 마이크로컨트롤러(MCU) 또는 컨트롤러는 시스템이 최소한의 기간을 충족하도록 보장할 수 있는데, 보통 수마이크로초에서 몇 밀리초 이내가 된다. - 구동은 출력을 제어하기 위해 계산한 출력 명령을 시스템에 적용하는 것을 나타낸다. 파워 일렉트로닉스 시스템을 구동하는 펄스폭 변조기(PWM) 장치의 듀티 사이클을 변경하는 것이 구동의 한 예이다. 구동을 강화하는 데 도움이 되는 TI 제품에는 아날로그 드라이버, 절연 게이트 드라이버, 통합 게이트 드라이버가 포함된 질화 갈륨(GaN) 전계 효과 트랜지스터가 있다.
- 마지막으로, 고속 직렬 인터페이스 또는 이더넷 등의 결정론적 고속 통신 인터페이스는 시스템과 외부 장치 또는 내부 구성 요소 간의 시기적절한 통신을 실현한다.
예를 들어 로보틱스에서 실시간 제어는 모터의 위치와 속도를 정확하게 제어하여 100µm 이내의 정확도로 로봇 암의 위치를 결정한다. 모터 전류와 전압의 상수 측정은 물론 모터 위치를 통해 이러한 정확도를 달성 가능하다. 처리 장치는 그림 2와 같이 측정된 값을 계산된 값과 비교한다. 이 결과를 바탕으로 처리 장치는 PWM 신호를 모터에 맞춘다. 또한, 시스템의 정확도와 타이밍 요구를 충족시키려면 전체 과정이 단 몇 마이크로초 내에 이루어져야 한다.
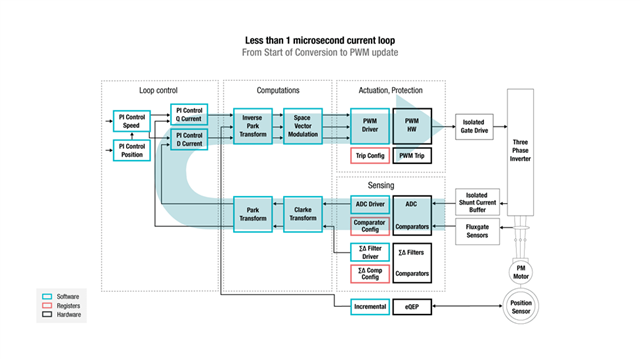
그림 2: 고속 전류 루프 다이어그램
실시간 제어는 효율적이고 안정적인 전원 공급 시스템의 토대이기도 하다. 예를 들어 실시간 제어는 충전소의 출력 전력을 안정적으로 유지하는 데 도움이 되며 자동차 배터리에 들어가는 전류를 조절하여 수명을 유지하고 과열을 방지한다. 실시간 제어를 MCU 및 GaN 등의 신기술과 결합하면 전력 밀도와 효율을 높여서 응용 분야에서 전력 손실을 최소화하는 데 도움이 될 수 있다.
최신 모터 구동 시스템의 성능이 꾸준히 증가함에 따라 실시간 제어의 요건 역시 증가했다. 예를 들어 매우 빠르고 정확한 컴퓨터 수치 제어 기계(그라인더와 터닝밀 등의 광범위한 복잡한 기계를 제어하는 기계)는 분당 20,000회 이상 회전하는 동안 5µm 이내의 정확도에 도달할 수 있다. 이러한 기능성은 매우 빠른 제어 루프로만 달성할 수 있다. 따라서 신호 측정 후 시스템 조정까지의 시간 지연은 보통 1µs 이내로 이루어질 수 있다.
시간에 매우 민감한 계산 부담으로 인해 많은 설계자들은 현장 프로그래밍 가능 게이트 어레이, 고속 외부 아날로그-디지털 컨버터, 다중 MCU를 사용한다. 그러나 TI의 C2000 MCU와 Sitara 프로세서는 고속 전류 루프라고 하는 1µs 이내에 전류 루프를 수행하도록 지원하는 더 높은 수준의 아날로그 통합을 제공한다. 고속 전류 루프를 최신 제어 토폴로지에서 이용하면 설계자들이 더 작고 더 성능이 뛰어난 시스템을 더 저렴한 비용으로 개발할 수 있다.
또한 TI의 MCF8316 모터 드라이버와 같이 완전 통합된 솔루션을 사용하면 비용 절감도 가능하다. 이러한 장치에는 미세 조정이 필요한 사전 프로그래밍된 브러시리스 DC 모터 제어 알고리즘이 있으며, 시스템 설계 단계 중에 전기적 소거 및 프로그래밍 가능 읽기 전용 통합 메모리를 구성하기 위해 MCU에서 간단한 I2C 인터페이스를 통해 달성할 수 있다. 여기에는 하드웨어 구성도 함께 제공되며, 이를 통해 시스템 설계자들은 MCU 없이도 모터를 튜닝할 수 있다. MCF8316은 6개의 금속 산화막 반도체 전계 효과 트랜지스터를 통합하여 전류를 모터에 전달하며, 그 결과 7mm X 5mm 패키지의 완전한 실시간 모터 제어 솔루션이 만들어진다.
실시간 제어는 그리드 인프라, 어플라이언스, 전기차 및 하이브리드 전기차, 전력 공급, 모터 드라이브, 로보틱스와 같은 응용 분야의 중요한 부분이다. 이 모든 응용 분야의 경우 더욱더 빠른 응답 시간을 실현하기 위해 더 짧은 실행 기간을 충족해야 할 필요성이 증가하고 있다. 감지, 처리, 제어 및 통신 기술로 구성된 TI의 전체 포트폴리오는 전력 효율, 성능, 저지연 응답 시간을 제공하여 더 작고 더 안정적인 실시간 제어 시스템을 가능하게 한다.
추가 리소스
- “C2000 실시간 마이크로컨트롤러를 사용한 개발을 위한 필수 가이드” 애플리케이션 노트 참조
- “산업 자동화를 위한 시간 민감형 네트워킹” 백서 읽어보기
- “실시간 제어 레퍼런스 가이드” 살펴보기
- “MCU를 통해 전기화 설계의 잠재력을 최대한 발휘하는 방법” 기고문 읽어보기
- 단일 MCU 레퍼런스 디자인에서 고속 전류 루프(FCL) 및 SFRA를 사용한 이중축 모터 드라이브 확인하기
- TI 로보틱스 방문 페이지 및 TI 모터 드라이브 방문 페이지로 이동하여 당사 제품에 대해 자세히 알아보기
마릴린 로잘린 캐스테네다(Marlyn Rosales Castaneda), TI C2000 고객 애플리케이션 엔지니어
마티아스 토마스(Matthias Thoma), TI 로보틱스 시스템 매니저
