Other Parts Discussed in Thread: SYSCONFIG
Hi!
Is it possible to change the UART flow control (CTS/RTS) during runtime?
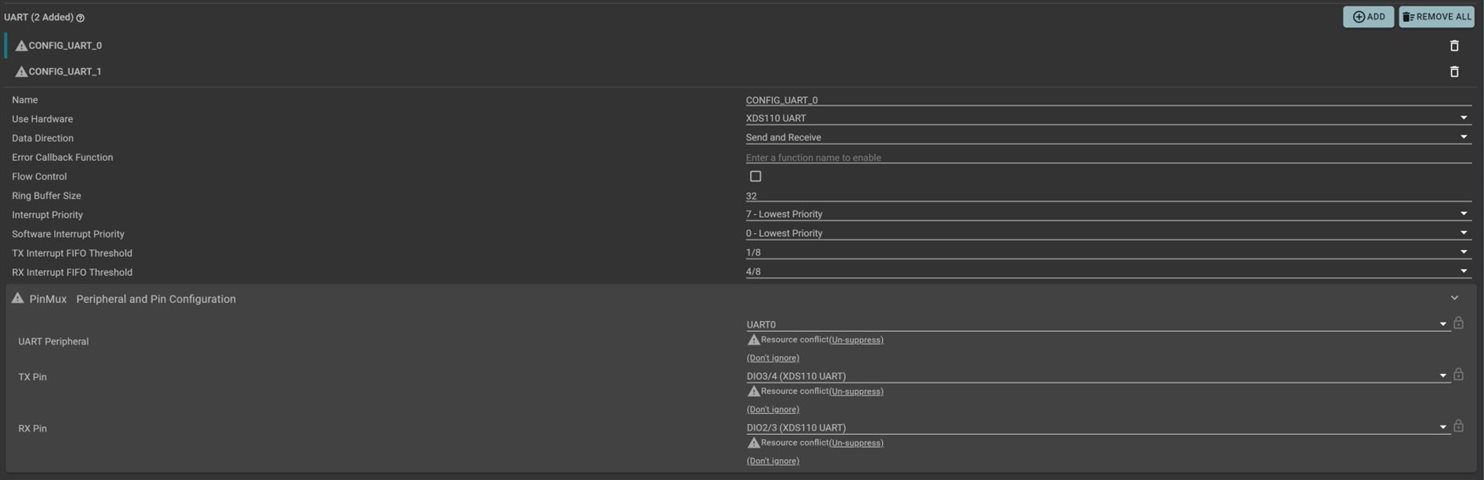
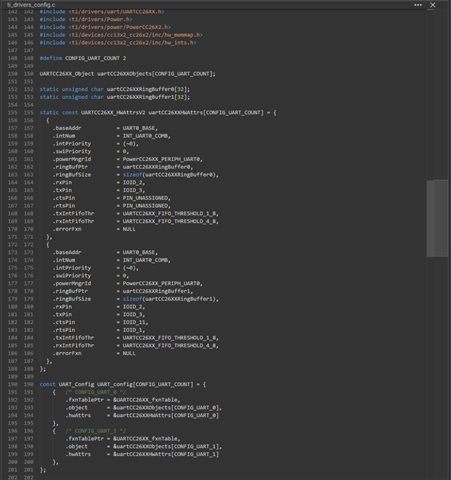
From what I can see, the flow control is set using the UARTCC26XX_HWAttrsV2 struct used in the UART_Config struct. These are declared const and does not seem to be meant for modifications after the UART is configured for the first time. Indeed, we get crashes if we try to change them.
However, our use case includes the ability to dynamically enable/disable UART flow control during operation. Is this at all possible?
We've looked into using driverlib functions such as UARTHwFlowControlEnable and IOCPortConfigureSet, but we haven't been able to get it to work.