When modifying the uart2callback example to receive more than one char I don't always get a callback even if there is data received in the UART buffer.
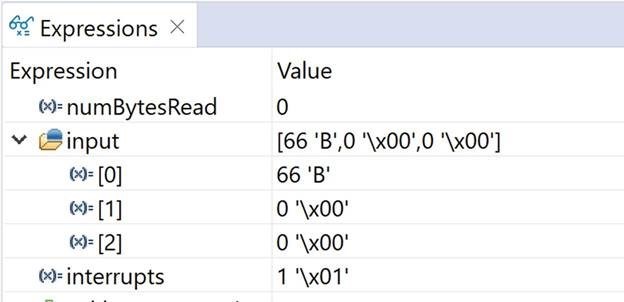
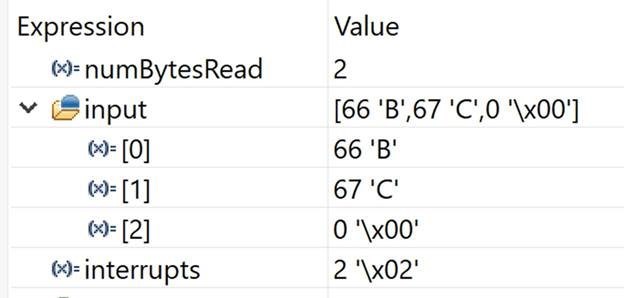
I get a callback when the first data is received, but when I call UART2_read again I don't get any callback for the remaining data.
When is the callback called?