Part Number: CC2642R
Other Parts Discussed in Thread: LAUNCHXL-CC26X2R1, SYSCONFIG
Hi Zhang,
Currently, we need to use the CC2642 UART to simulate a LIN bus for data transmission. During testing, we found that there is an excessive delay in UART data reception. The details are as follows:
Test demo:
SDK example: examples\rtos\CC26X2R1_LAUNCHXL\drivers\uart2callback
UART configuration:
Baud rate: 19200 bps
Test procedure:
The PC sends one byte at a time. After the CC2642 receives the byte, it immediately transmits one byte back (echo: receive what is sent).
Test result:
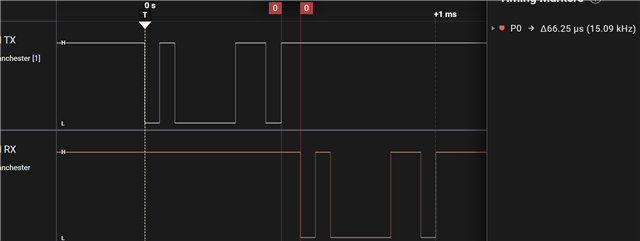
For data sent from the PC, the CC2642 takes more than 2 ms to receive and retransmit the byte. When the baud rate is increased to 115200 bps, the delay is reduced to approximately 400 µs. As shown in the figure below (yellow waveform: data sent by PC; pink waveform: data returned by CC2642).
In addition, switching to blocking mode reception based on this demo produces the same result.
Requirement:
A 2 ms reception delay at 19200 bps is unacceptable for LIN simulation.This issue may be related to the UART idle interrupt. Is there any way to shorten the UART receive interrupt trigger latency?