Other Parts Discussed in Thread: OPA2192, OPA388
Dear expert,
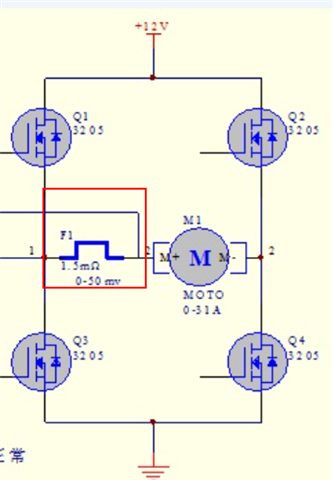
I want take measurement for current flow through Moto with OPA2192.
1.5mohm current sensor resistor is in below position.
The challenge is the current flow in both direction.
In one direction, voltage is 12V to 12V-50mV cross current sensor resistor.
In another direction, voltage is 0V to 50mV cross current sensor resistor.
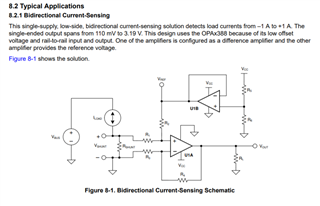
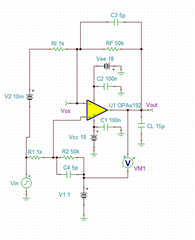
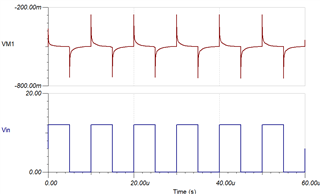
How to amplifier this signal with OPA2192 and then send to ADC inside MCU?
Great thanks