


Other Parts Discussed in Thread: TIDA-00472, , INA241A, INA241B, INA240, INA181, OPA374
Hello,
We designed a board to drive a BLDC motor with a 16.6V 15amps supply battery.
We would like to implement Cycle by cycle current sensing for the motor and current measurements on the battery.
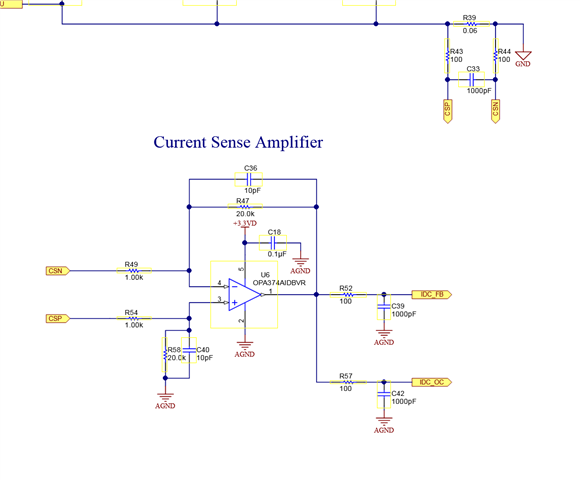
I looked at the reference design TIDA-00472 and saw that for current sensing it uses an op-amp and not IN-amp and that it has filters on both the input and output.
On the INA180 datasheet it states that it is best to filter the output and the input filter is only needed when output filtering is no an option.
Do I need to implement both input and output filters or just an output filter is eanough?
Also, is there a benefit to use the OP-AMP instead of the IN-AMP? (I think not bu please correct me if I am wrong).
Thanks,
Tomer



