


Other Parts Discussed in Thread: MOTORWARE, TIDA-00366
Hi,
I used AMC1311BDWV for phase voltage sensing to drive a 3 phase PMSM motor with MOTORWARE and INSTASPIN, but the results seem uncorrect.
I dont know how to choose the right value for my 72V motor project
USER_IQ_FULL_SCALE_VOLTAGE_V
USER_ADC_FULL_SCALE_VOLTAGE_V
V_A_offset
V_B_offset
V_C_offset
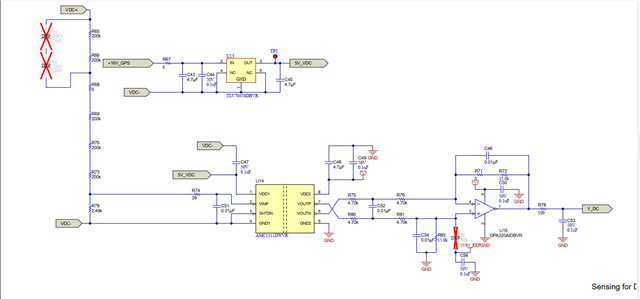
Here is the DC_LINK voltage sensing that I referenced from TIDA-00366
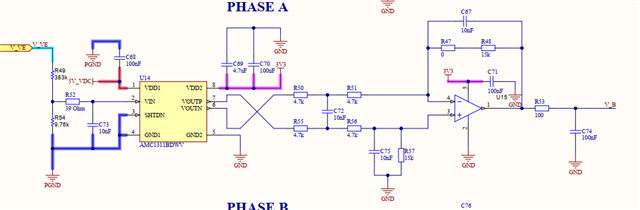
My voltage sensing circuit is included below
I notice that there is a 1.65V REFGND that is left unconnect in TIDA00366.
1. Does that mean I need to use 1.65VREFGND for bidirectional voltage for AC voltage sensing?
2. How can I choose above Variables in MOTORWARE?
Can someone help me? Thank you!
Phan
