Other Parts Discussed in Thread: DRV8814
hi
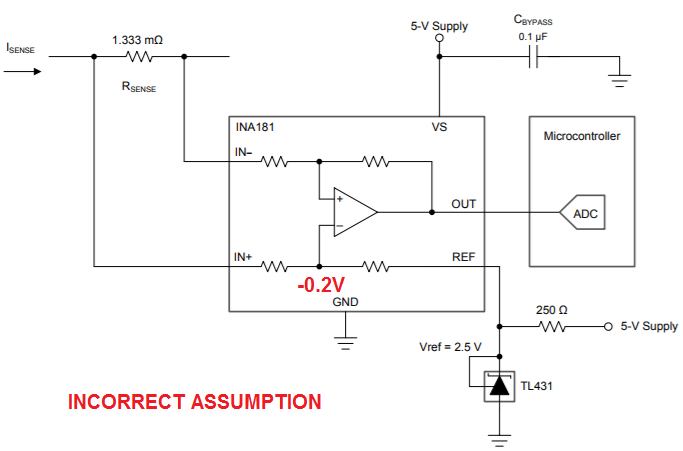
The doc titled "Low cost bi-directional current sensing using INA181"
states on page 5 equation 3 that: -0.2 = 2.5 - (500/525)*(2.5 +Vin+)
1. where is the ratio of 500/525 is coming from?
2. what it the connection of the above calculation to the formula Vout = Vref + (Vsense * GAIN)?
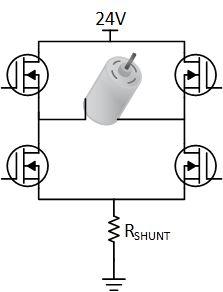
I want to use the INA181 for PWM driven PMDC motor.
Regards, M. Hooper