Other Parts Discussed in Thread: INA282
Does TI make a simple single stage isolation amplifier with similar TSSOP8 pin orientation? The PCB layout for primary current monitors has pads for a 240 partner REF control by output of primary 240. We like to add additional TSSOP8 amplifier to isolate primary 240 output prior to entering ADC without the complex Delta Sigma scheme. The 240 SNR into ADC is a bit high even with series R and distortion of current measure error occurs >400us sample settling.
Can 2nd buffer add some ADC isolation and REF1/2 inputs are tied to output of 1st 240? Also circuit can ground +/-IN pins of 2nd 240 makes it inverting isolation stage or buffer for the 1st 240?
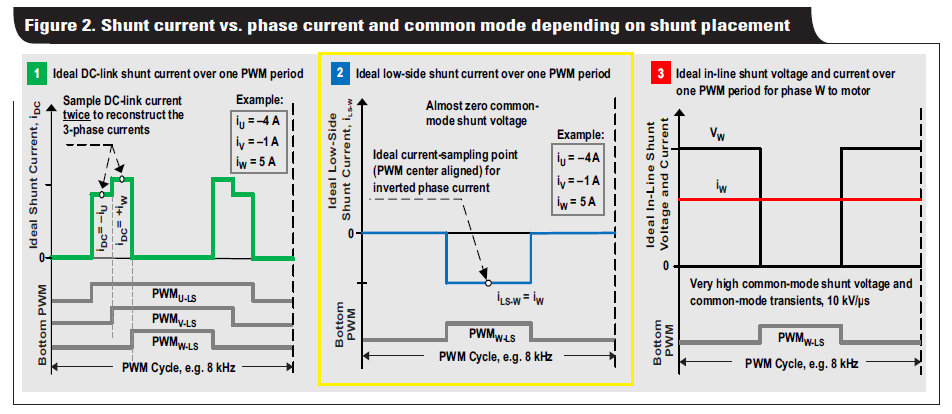
Another question TI "Selecting amplifiers for shunt based current sensing" PDF (Figure.2-2) states low side shunt produces an inverted signal to +/-IN, e.g Table 1 low side monitor (Challenges column).
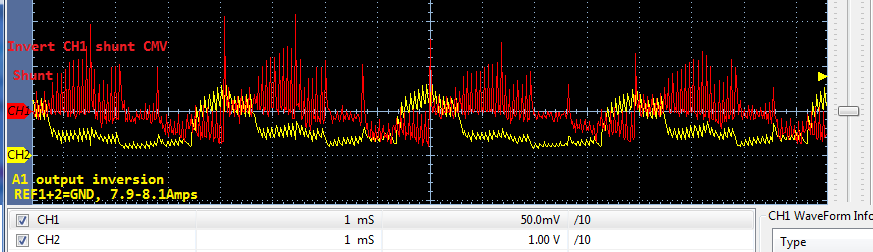
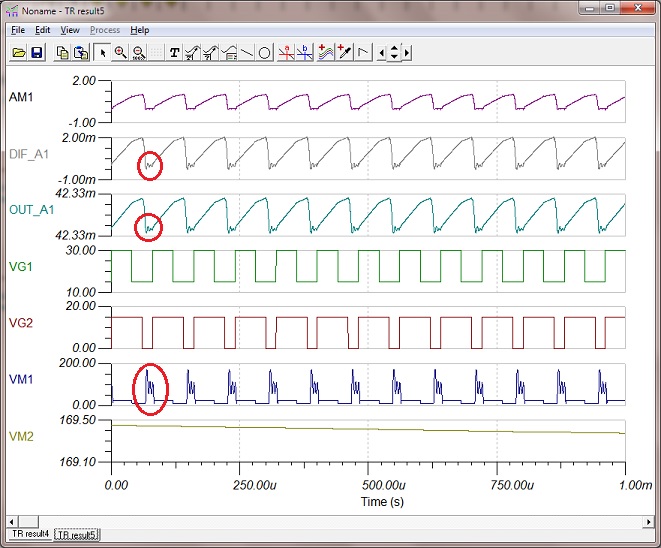
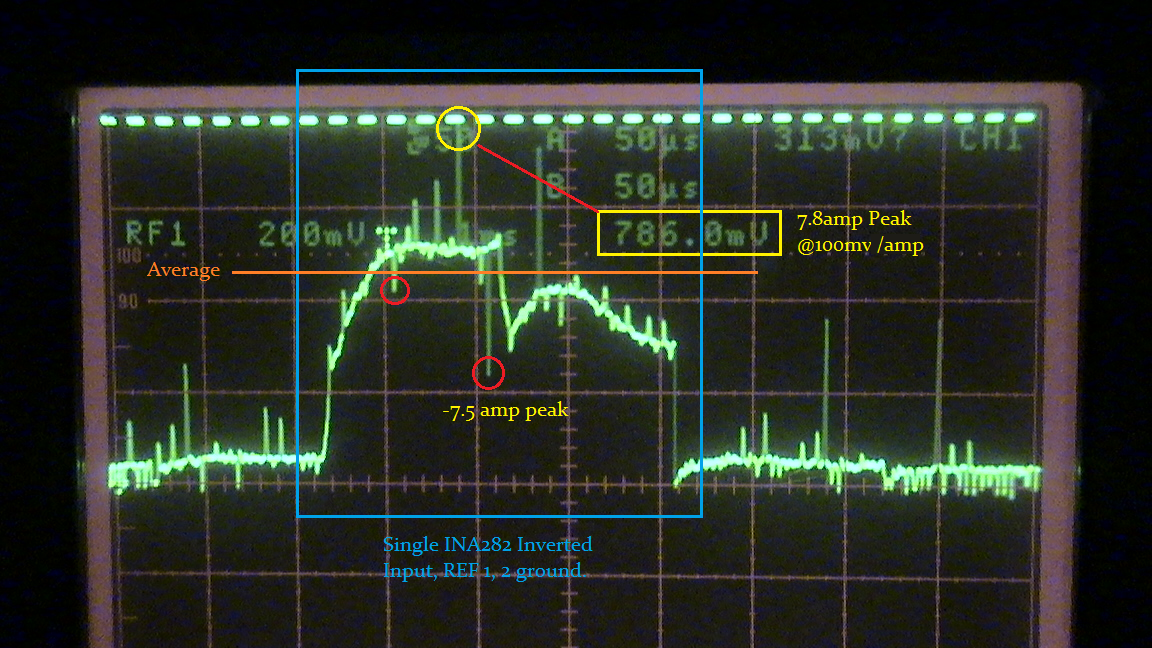
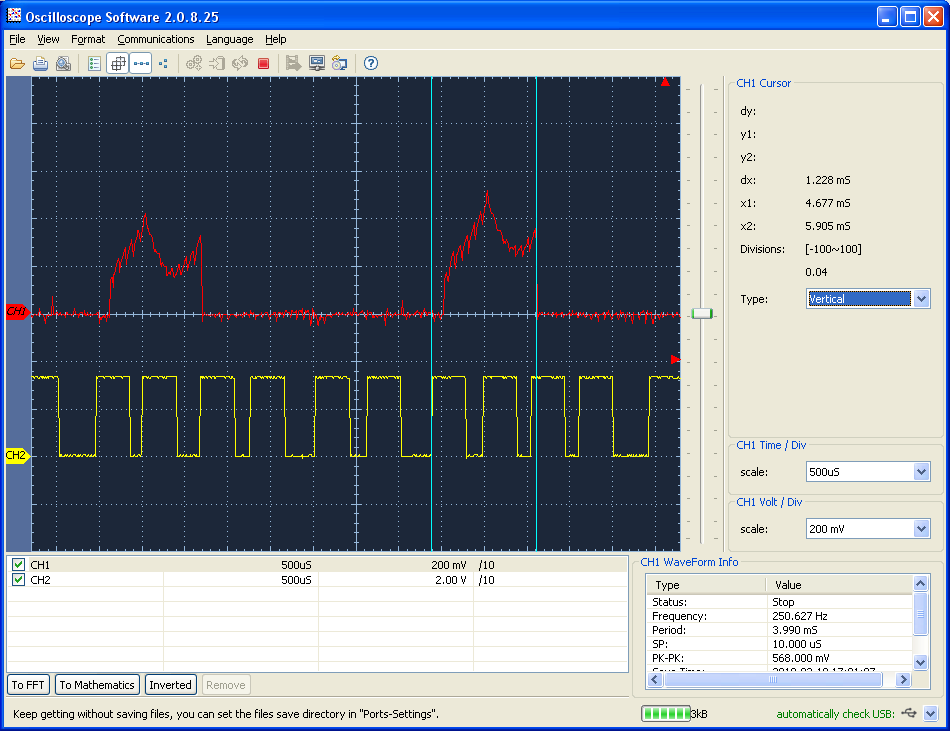
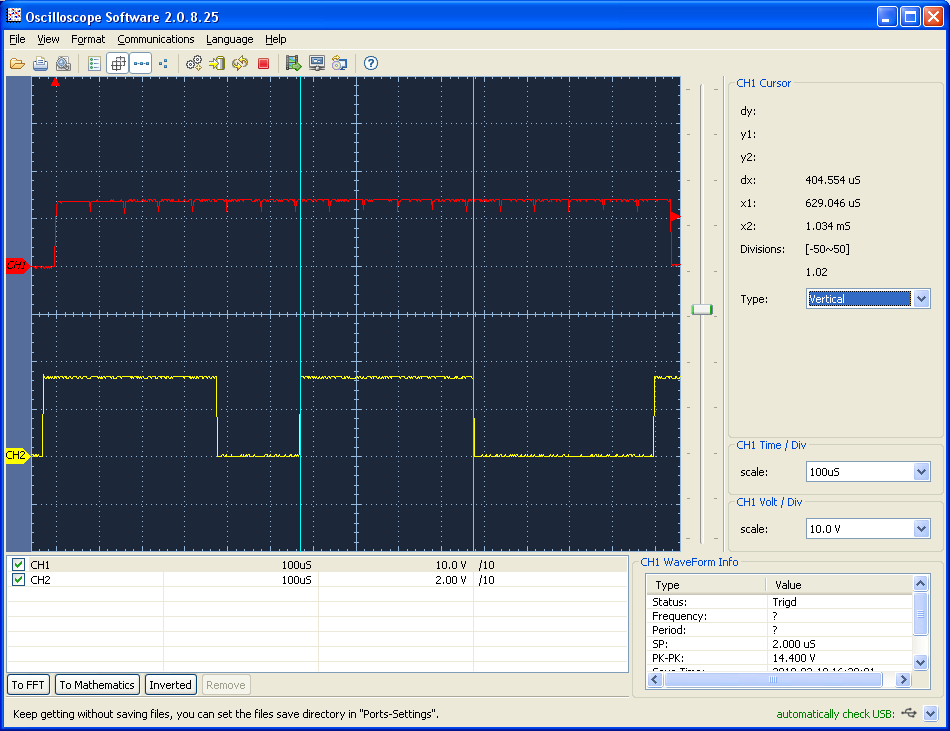
When 240 REF1/2 are wired +1.225v that seemed to occurre and I was challenged in this forum it was impossible. The bad part was the 240 output raised shunt inversion above REF1/2 +1.225v threshold. A scope capture seemed to indicate the shunt signal on 240 output was indeed inverted and became obvious via added 22nF decouple filter cap into ADC. Can TI confirm Fig2-2 is accurate low side shunt signal is inverted, when +IN non-inverting input faces B+ on low side monitor? It seems when REF1/2 wired to GND the 240 output inversion is seemingly not occurring as bad. Yet it seems the +IN should be measuring forward current into ground and instead is measuring inverter reverse current, e.g. Fig2-2 example above (>0v) ground. Shunt inversion seems to explain why scope tends to capture PWM transients outside 240 sample point. Oddly the sample point (Fig.2-2) is occurring >400us after the timed event and should be occurring no later than 9.6us @0.5% of final value.