


Hi everyone,
I am a little confused about the different waveforms for sensorless and sensored control of BLDC, motor not loaded.
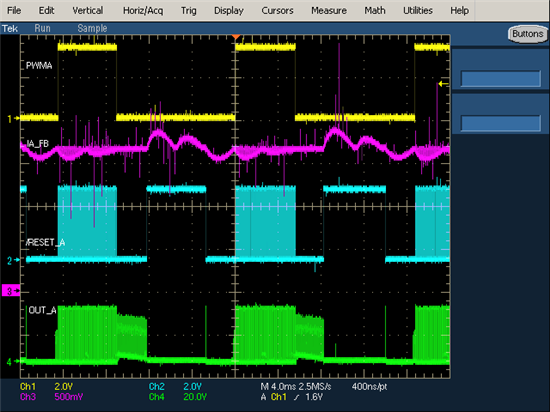
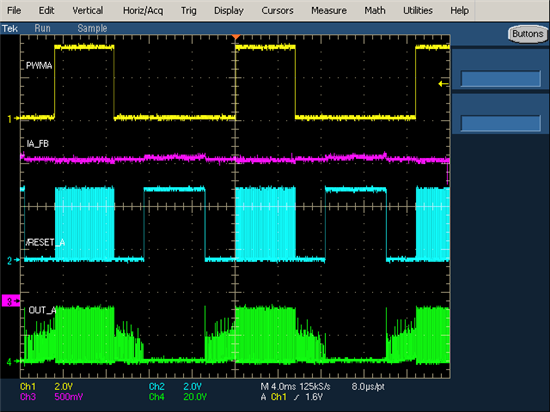
I got the waveforms for sensored (left) and sensorless (right) control of BLDC with CCSv4.
Yellow: PWMA
Purple: IB_A
Light blue: /RESET_A
Green: OUT_A
Sensor or sensorless, the differece is the calculation/estimation of the rotor position. I don't understand why the OUT_A for sensored and sensorless so different.
Could somebody point it out for me?
Long


