


Other Parts Discussed in Thread: DRV8886, DRV8886AT
Hi,
I have designed a pcb with 3 DRV8825s to drive 3 different axis. All drivers have the following settings:
Voltage: 24v
Current resistor - 0.1ohm
Current setting - 1.6A (can not be changed by uC)
Microstepping: 1/16
Decay: Mixed (can not be changed by uC)
The PCB is 2 layers.
The motors have the following stats:
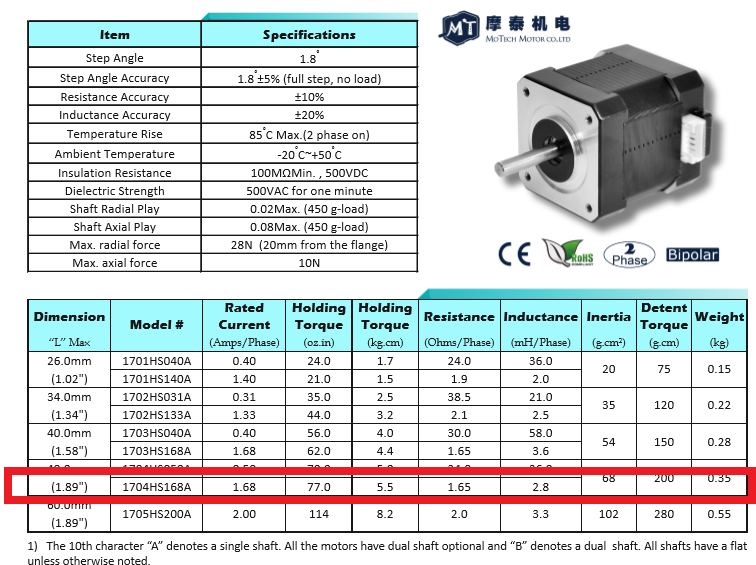
The issue is when all 3 motors are energised. Working with 1 motor there is no audioable noise that is noticeable. 2 Motors there is a slight "buzzing" sound coming from the 2 motors and when a 3rd motor is run then there is a lot of noise - humming, buzzing, hissing. It sounds like the white noise of an old TV channel. This only occurs when the motors are stationary. It also feels like the motors are vibrating slightly. What can we do to fix this issue? Any recommendations for removing this noise. And is it damaging to the motors?
Thanks,
Jack
Schematics attached:Scotsat Main PCB V3 Schematics.Zip
