Other Parts Discussed in Thread: LMX2491, LMX2492, CODELOADER, LM6211, LP5900, USB2ANY, LMX2594
Hi Team,
Our customer bought the LMX2492EVM development kit with the LMX2491 component installed. He has some inquiries as follows:
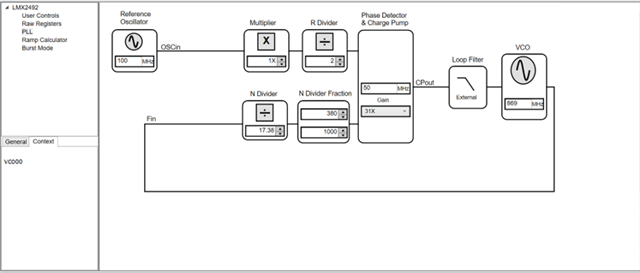
1. Not specified on the data sheet VCO voltages and although the estimate works on 5V the VCO installed has a range of 14V so I wanted to know what the range is?
2. I am trying to build my own GUI interface for this component and specified in the user guide of code loader some VBA commands but some of them do not work and lack a lot of parameters like panel names etc ...
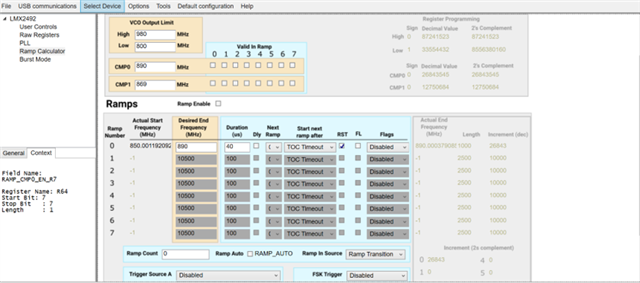
3. There are two development kits on your site for the LMX2492 component when in one of them you get an output of the frequency divided by 4 and I wanted to ask why I did not get it? And is it possible to assemble it?
4. Is it possible to access the DLL and EXE files or even the names of the functions built into them so that I can attach them to my project
Regards,
Danilo