Other Parts Discussed in Thread: ADS127L11
Hello TI Team,
I have used ADS127L11 EVM with Teensy 4.0 ( MIMXRT1062DVL6B) Development Board.
Needful Setup in EVM : (ADS127L11EVM with an external controller board)
I have provide +5V to J12 at +Vin side and +2.5V to J13 IOVDD supply.
Jumper Connections:
Attached JP3 jumper. (as default)
Attached JP4 jumper with +Vin & +LDOVin pin.
Attached JP5 jumper with AVSS & GNS pin.
Attached JP6 jumper with 2&3 EVM Clk pin.
Attached JP7 jumper with 2&3 PHI Clk pin.
Connect RST,START,SDI,CS,SCLK,SDO and Ground pin with Teensy 4.0 SPI Interface.
Also I here attached connection picture for the same.

Please verify above connections and suggest if any changes required.
Firmware Development :
I will try to read and write register from ADS127L11 and also try with DEV_ID.
I make Start and Reset Pin High then try to send data in SDI.
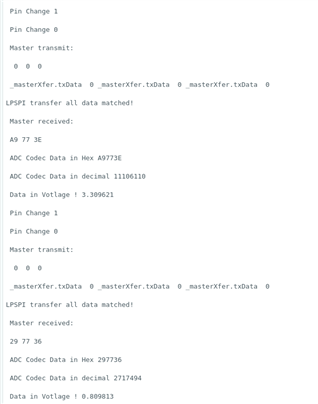
For getting 24 Bit ADC Raw data according to datasheet I have sent 0x00 0x00 0x00 (NOP) frame in SDI.
In that after sometimes I got RAW data in hex format and convert into codec format (5400662, 5400672,5399097 etc. Codec data). Also got 1.66V at J4 side.
I have check with change voltage at J4 side and got data in codec format but this changes is not instant it's take long time 2 to 5 minutes and also i din't get proper output voltage.
One thing also mention to here I didn't get this data continuously even though i have sent frame in SDI, unexpectedly at that time i got value 0x00. So, i need to set any other register from Firmware side?
Also i have observed when I power off Bench Power supply from +5V to J12 side and also +2.5V to J13 IOVDD supply side then i got same problem i got 0x00. So, Is there any Hardware side power sequence i need to follow to get RAW data?
I attached my .c & .h file for your reference.
/* -- driver library Includes -- */
#include "fsl_lpspi.h"
#include "fsl_gpio.h"
#include "fsl_debug_console.h"
#include "math.h"
/* -- Ended driver library Includes -- */
/* -- User defined library Includes -- */
#include "SPIWrapper.h"
#include "SystemDelay.h"
/* -- Ended User defined library Includes -- */
/* -- User defined variables -- */
static int32_t _errCode = kStatus_Fail;
static uint8_t _masterRxData[3] = {0U};
static uint8_t _masterTxData[4] = {0U};
/* -- Ended User defined variables -- */
void SW_LPSPI_Init(void)
{
uint32_t _srcClock_Hz;
lpspi_master_config_t _masterConfig;
/*Master config*/
LPSPI_MasterGetDefaultConfig(&_masterConfig);
_masterConfig.baudRate = TRANSFER_BAUDRATE;
_masterConfig.whichPcs = EXAMPLE_LPSPI_MASTER_PCS_FOR_INIT;
_masterConfig.pcsToSckDelayInNanoSec = 1000000000U / (_masterConfig.baudRate * 2U);
_masterConfig.lastSckToPcsDelayInNanoSec = 1000000000U / (_masterConfig.baudRate * 2U);
_masterConfig.betweenTransferDelayInNanoSec = 1000000000U / (_masterConfig.baudRate * 2U);
_srcClock_Hz = LPSPI_MASTER_CLK_FREQ;
LPSPI_MasterInit(EXAMPLE_LPSPI_MASTER_BASEADDR, &_masterConfig, _srcClock_Hz);
PRINTF("\r\n--- LPSPI Initialization Completed ---\r\n");
}
void SW_LPSPI_SetClockSource(void)
{
PRINTF("LPSPI Set Clock Source\n");
/*Set clock source for LPSPI*/
CLOCK_SetMux(kCLOCK_LpspiMux, EXAMPLE_LPSPI_CLOCK_SOURCE_SELECT);
CLOCK_SetDiv(kCLOCK_LpspiDiv, EXAMPLE_LPSPI_CLOCK_SOURCE_DIVIDER);
}
void SW_LPSPI_Write(void)
{
uint32_t _index;
lpspi_transfer_t _masterXfer;
memset(_masterTxData, 0, sizeof(_masterTxData));
/*Start master transfer, transfer data to slave.*/
_masterTxData[0]=0x00;
_masterTxData[1]=0x00;
_masterTxData[2]=0x00;
// _masterTxData[3]=0x00;
// _masterTxData[4]=0x00;
// _masterTxData[5]=0x00;
/* Print out transmit buffer */
PRINTF("\r\n Master transmit:\r\n");
for (_index = 0U; _index < TRANSFER_SIZE; _index++)
{
/* Print 16 numbers in a line */
if ((_index & 0x0FU) == 0U)
{
PRINTF("\r\n");
}
PRINTF(" %02X", _masterTxData[_index]);
}
PRINTF("\r\n");
_masterXfer.txData = _masterTxData;
_masterXfer.rxData = NULL;
_masterXfer.dataSize = 3;
_masterXfer.configFlags =
EXAMPLE_LPSPI_MASTER_PCS_FOR_TRANSFER | kLPSPI_MasterPcsContinuous | kLPSPI_MasterByteSwap;
LPSPI_MasterTransferBlocking(EXAMPLE_LPSPI_MASTER_BASEADDR, &_masterXfer);
/* Delay to wait slave is ready */
if (SysTick_Config(SystemCoreClock / 1000U))
{
while (1)
{
}
}
}
void SW_LPSPI_Read(void)
{
uint32_t _errCount;
uint32_t _index;
lpspi_transfer_t _masterXfer;
int32_t adc_val_raw = 0;
float Voltage = 0;
/* Start master transfer, receive data from slave */
_masterXfer.txData = NULL;
_masterXfer.rxData = _masterRxData;
_masterXfer.dataSize = 3;
_masterXfer.configFlags = EXAMPLE_LPSPI_MASTER_PCS_FOR_TRANSFER | kLPSPI_MasterPcsContinuous | kLPSPI_MasterByteSwap;
LPSPI_MasterTransferBlocking(EXAMPLE_LPSPI_MASTER_BASEADDR, &_masterXfer);
_errCount = 0U;
for (_index = 0U; _index < TRANSFER_SIZE; _index++)
{
if (_masterTxData[_index] != _masterRxData[_index])
{
_errCount++;
}
}
if (_errCount == 0U || _errCount != 0U)
{
PRINTF(" \r\nLPSPI transfer all data matched! \r\n");
/* Print out receive buffer */
PRINTF("\r\n Master received:\r\n");
for (_index = 0U; _index < TRANSFER_SIZE; _index++)
{
/* Print 16 numbers in a line */
if ((_index & 0x0FU) == 0U)
{
PRINTF("\r\n");
}
PRINTF(" %02X", _masterRxData[_index]);
}
PRINTF("\r\n");
}
else
{
PRINTF("\r\nError occurred in LPSPI transfer ! \r\n");
}
adc_val_raw = (_masterRxData[0]<<16)|(_masterRxData[1]<<8)|_masterRxData[2];
PRINTF("\r\n ADC Codec Data in Hex %02X\r\n",adc_val_raw);
PRINTF("\r\n ADC Codec Data in decimal %d\r\n",adc_val_raw);
// Take Refrence voltage 2.5
Voltage = (float)(adc_val_raw)*(0.000000298);
PRINTF("\r\n Data in Votlage ! %f\r\n",Voltage);
}
void SW_GetSlaveData(void)
{
uint32_t _loopCount = 1U;
#if LOOP_BACK_TEST
PRINTF("LPSPI Start.\r\n");
uint8_t _index;
lpspi_transfer_t _masterSPI;
uint8_t _masterRxData[LPSPI_TRANSFER_SIZE] = {0};
uint8_t _masterTxData[LPSPI_TRANSFER_SIZE] = {0};
for (_index = 0; _index < LPSPI_TRANSFER_SIZE; _index++)
{
_masterTxData[_index] = _index;
}
/*Start master transfer*/
_masterSPI.txData = _masterTxData;
_masterSPI.rxData = _masterRxData;
_masterSPI.dataSize = LPSPI_TRANSFER_SIZE;
_masterSPI.configFlags = BOARD_LPSPI_PCS_FOR_TRANSFER | kLPSPI_MasterPcsContinuous;
LPSPI_MasterTransferBlocking(BOARD_EEPROM_LPSPI_BASEADDR, &_masterSPI);
/* Compare Tx and Rx data. */
for (_index = 0; _index < LPSPI_TRANSFER_SIZE; _index++)
{
if (_masterTxData[_index] != _masterRxData[_index])
{
break;
}
}
if (LPSPI_TRANSFER_SIZE == _index)
{
PRINTF("LPSPI loopback test pass!!!\r\n");
}
else
{
PRINTF("LPSPI loopback test fail!!!\r\n");
}
#endif
PRINTF("LPSPI Polling.\r\n");
PRINTF("Master uses polling way and slave uses interrupt way. \r\n");
PRINTF("Please make sure you make the correct line connection. Basically, the connection is: \r\n");
PRINTF("LPSPI_master -- LPSPI_slave \r\n");
PRINTF(" CLK -- CLK \r\n");
PRINTF(" PCS -- PCS \r\n");
PRINTF(" SOUT -- SIN \r\n");
PRINTF(" SIN -- SOUT \r\n");
PRINTF(" GND -- GND \r\n");
GPIO_PinWrite(EXAMPLE_START_GPIO, EXAMPLE_START_GPIO_PIN, 1U);
while (1)
{
/* Set up the transfer data */
for (uint32_t _index = 0U; _index < TRANSFER_SIZE; _index++)
{
_masterRxData[_index] = 0U;
}
/*Start master transfer, transfer data to slave.*/
SW_LPSPI_Write();
/* Delay 20 ms */
SW_Delay_Ms(20U);
/* Start master transfer, receive data from slave */
SW_LPSPI_Read();
/* Wait for press any key */
PRINTF("\r\n Press any key to run again\r\n");
GETCHAR();
/* Increase loop count to change transmit buffer */
_loopCount++;
}
}
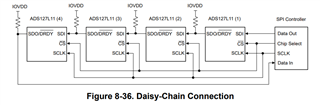
Once this problem solve also I need to Implement Daisy-chained.
Please help out to resolve this problem or provide guidance if i am doing any wrong direction.