Hi,
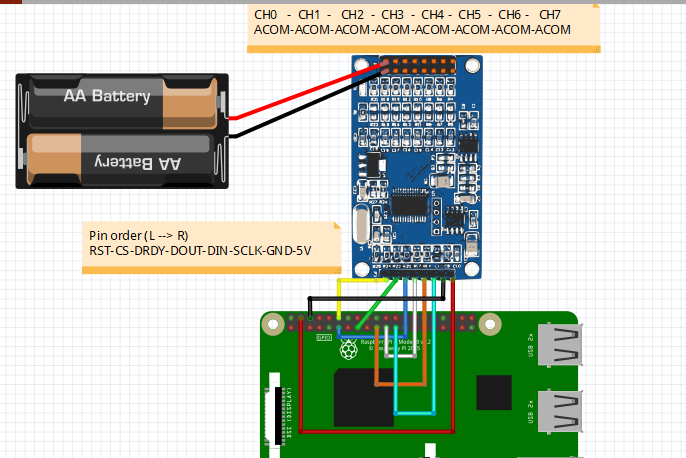
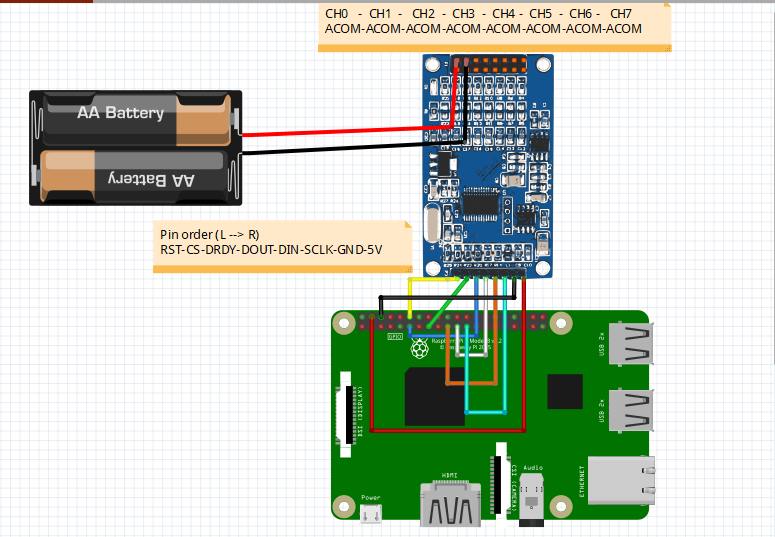
I have a ADS1256 hooked up to a Raspberry Pi 4 and I'm trying to read DC voltages on the analog pins of the ADS1256. The DC voltage I'm currently reading is 2.54 V from a DC power supply. The power supply itself has a common ground; therefore, it's feeding common ground signal to the ADS1256. When using the common mode, I connected the red (positive) wire to channel 0 and the black (ground) to the ACOM pin adjacent to channel 0. I then collected 5 min worth of data and the values I was getting average to 2.55 V which is very close to the original 2.54 V. I also noticed a lot of noises on the remaining analog pins. Even though they weren't connected, they were picking voltages close to 1.25 V. For my project, I need at least 3 channels and at most 4 channels.
I then tried the differential mode. I connected the red wire to channel 0 and the black wire to channel 1. I also collected the data for 5 min and this time the value averaged to 2.41 V which is way off of the original 2.54 V. For the differential mode, the other channels read a value close to 0.004 V which is quite consistent giving that the other channels aren't connected to anything. The ultimate goal is read the channels with the lowest noise possible. I was told that differential mode should perform relatively better than the common mode in terms of noise reduction but I don't know why I'm getting contradictory data. My first assumption was that since the signal being fed isn't differential per se, the analog pins have trouble reading the values.
My current settings for the ADS is 1000SPS , GAIN = 1, clock division = 256 and the software I'm using is in C.