


Other Parts Discussed in Thread: ADS131E08EVM-PDK
Hello, everyone,
I would like to read out the ADS131E04 with an Arduino Due via SPI. Unfortunately, I have little previous experience, and this is my first project with an SPI communication.
The voltage level of the SPI is 3.3V and should work with the ADC. I set the clock rate for the SPI communication to 4 MHz. The SPI mode is 1 (CPOL = 0, CPHA=1) and I have set "MSB first".
You can see my code below. If I read out e.g. the ID register in the loop, the answer is always 0x00. I have also already read out all registers one after the other. All of them return the value 0x00. I have also recorded the communication with a logic analyzer. The Arduino sends out commands correctly. I believe the timing is appropriate as well. The signals look good with the oscilloscope so far. The voltage levels and timing are good.

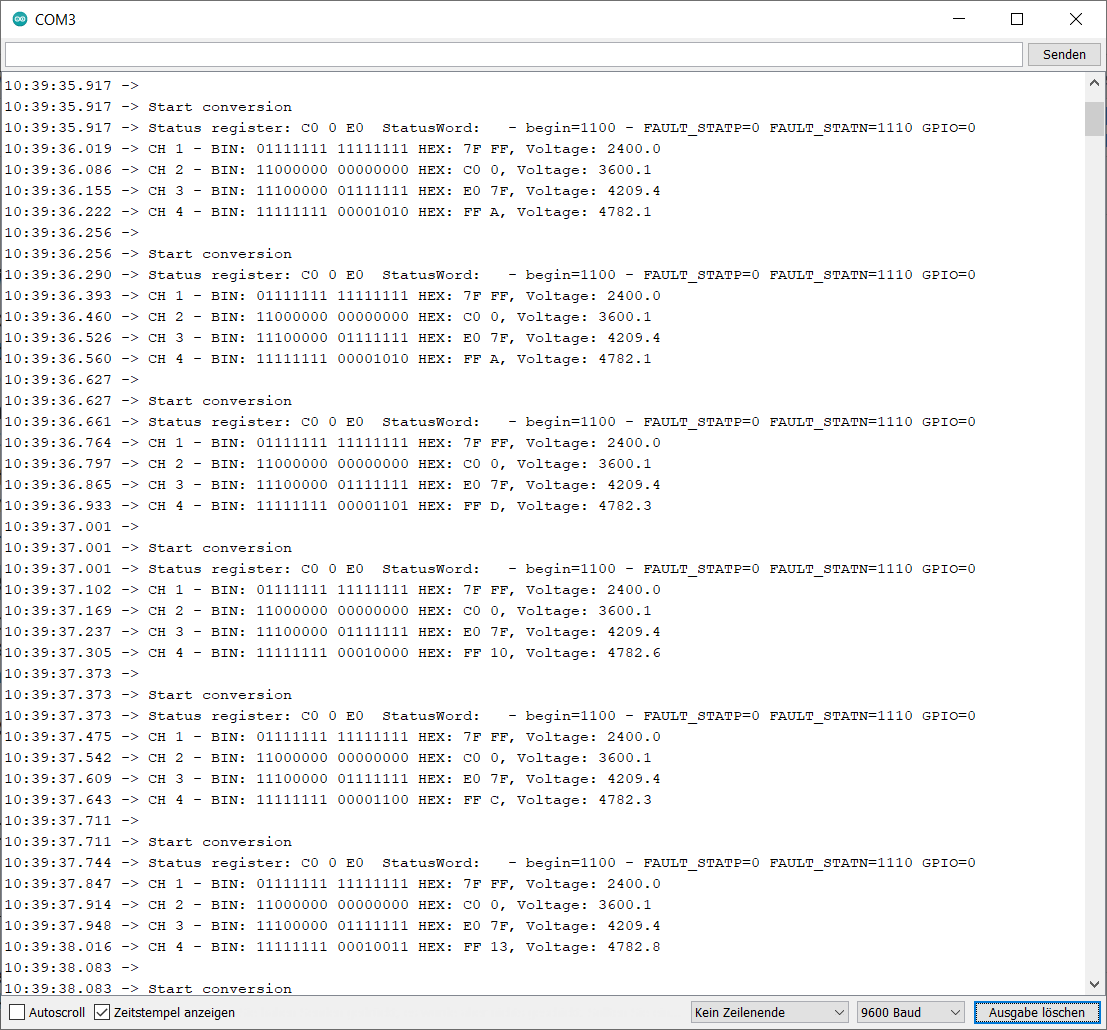
If I read out the sampled data continuously, I also get back measured values which are more or less stable. Here is a sample of the measured data and the recording with the Logic Analyzer. The conversion into the voltage is probably incorrect, because I do not yet consider the sign in the calculation. I would be very happy to receive tips on this.

For me, the conclusion is that SPI communication in general works and the ADC is also able to send data that the Arduino understands. Unfortunately, the ADC does not understand the commands I send it, otherwise it would output the register values correctly. Therefore, I think that writing the registers will not work. I have checked the wiring with a colleague several times and found no errors so far. I suspect that maybe the initialization of the ADC is not yet optimal, and I would be glad if someone can help me here. I have followed the procedure from the data sheet (p. 59, Figure 53). I measured the voltage VCAP1 about 1.2V. The toggling of the nDRDY signal with fclk/64 was also visible.
Do you have any hints on what else I can look for? Or did you find errors in my code?
Thank you in advance!
Mandy
Here is the header file:
#define NUM_REGISTERS ((uint8_t) 21) // 12 Registers are readable and writable (00h to 0Ch and 12h to 14h) --> The addresses 0Dh to 11h cannot be skipped when reading out all registers one after the other (data sheet. pp 38)
#define nCH ((int) 4) // ADC: number of channels
//register addresses
#define ID_reg_add ((uint8_t) 0x00)
#define CONFIG1_reg_add ((uint8_t) 0x01)
#define CONFIG2_reg_add ((uint8_t) 0x02)
#define CONFIG3_reg_add ((uint8_t) 0x03)
#define FAULT_reg_add ((uint8_t) 0x04)
#define CH1SET_reg_add ((uint8_t) 0x05)
#define CH2SET_reg_add ((uint8_t) 0x06)
#define CH3SET_reg_add ((uint8_t) 0x07)
#define CH4SET_reg_add ((uint8_t) 0x08)
#define FAULT_STATP_reg_add ((uint8_t) 0x12)
#define FAULT_STATN_reg_add ((uint8_t) 0x13)
#define GPIO_reg_add ((uint8_t) 0x14)
// registers default values
#define ID_default ((uint8_t) 0x00) //unknown, read only
#define CONFIG1_default ((uint8_t) 0x91)
#define CONFIG2_default ((uint8_t) 0xE0)
#define CONFIG3_default ((uint8_t) 0x40)
#define FAULT_default ((uint8_t) 0x00)
#define CHnSET_default ((uint8_t) 0x10)
#define CHnPWDN ((uint8_t) 0x90)
#define FAULT_STATP_default ((uint8_t) 0x00) // read only
#define FAULT_STATN_default ((uint8_t) 0x00) // read only
#define GPIO_default ((uint8_t) 0x0F)
#define GPIO_output ((uint8_t) 0x00)
// SPI control commands (ADC datasheet, p. 35)
#define WAKEUP 0x02 //Wake-up from standby mode
#define STANDBY 0x04 //Enter standby mode
#define RESET 0x06 //Reset the device
#define START 0x08 //Start or restart (synchronize) conversions
#define STOP 0x0A //Stop conversions
#define OFFSETCAL 0x1A //Channel offset calibration
#define RDATAC 0x10 //Enable read date continuous mode
#define SDATAC 0x11 //Stop read data continuous mode
#define RDATA 0x12 //Read data by command
#define WREG 0x40 //Write reg
#define RREG 0x20 //read reg
//constants
#define max_23bit 8388607
#define max_15bit 32767
#define max_8bit 255
#define Uref_mV 2400
#define byte_status ((int) 3)
#define byte_data ((int) 2)
typedef struct{
uint8_t Begin1100:4;
uint8_t FAULT_STATP:8;
uint8_t FAULT_STATN:8;
uint8_t GPIO:4;
}StatusWord_t;
// function prototypes
void initialize_pins(void);
void startADC(void);
void writeSingleRegister(uint8_t address, uint8_t data);
byte readSingleRegister(uint8_t address);
void readAllRegisters();
void readADC(byte status_reg[], byte data[nCH][byte_data]);
float calcVoltage_mV(uint32_t ADCvalue);
float calcTestVoltage_mV(uint32_t value);
StatusWord_t writeStatusWord(uint32_t ADC_status);
#define PRINTBIN(Num) for (uint32_t t = (1UL<< (sizeof(Num)*8)-1); t; t >>= 1) Serial.write(Num & t ? '1' : '0'); // Prints a binary number with leading zeros (Automatic Handling)
And here is the main file:
#include "TimeLib.h" #include <SPI.h> #include "ADS131E04.h" unsigned long time; // Pins #define ADC_nCS_Pin 10 #define ADC_MasterClk_Select_Pin 11 #define ADC_nDRDY_Pin 12 //active low #define ADC_Start_Pin 7 #define ADC_nPWDN_Pin 9 // active low #define ADC_nSysReset_Pin 8 // active low // SPI #define SPI_CLOCK_DIV ((int) 21) // Output mode boolean RDATA_MODE = true; //true - RDATA; false - RDATAC boolean CAPTURE_DATA_MODE = false; // true - read ADC; false - read Reg in loop #define pinport PIOB #define pinmask (1<<25) // Arduino pin 2 is port B pin 25 (see www.robgray.com/.../Due-pinout-WEB.png) // Serial output flags boolean print_status_word = true; boolean print_data = true; // times const int t_StartADC_us = 25; // 25 µs const int t_measure_us = 1000000; // 100 ms const int t_delay_SPI_5_us = 5; // 5 µs const int t_delay_SPI_2_us = 2; // 2 µs byte ADC_values_nCH[nCH][byte_data]; // 3 byte (24bit) for each channel byte response_status[byte_status]; // 3 status register StatusWord_t StatusWord; int32_t ADC_total=0; uint32_t ADC_status=0; int Test_voltage_LOW=78; // 0...255 --> 0V...3,3V (78 = ca. 1.0V) int Test_voltage_HIGH=150; // 0...255 --> 0V...3,3V (50 = ca. 1.5V) //=========================================== void setup() { // put your setup code here, to run once: Serial.begin(9600); Serial.println(" ======================================= "); Serial.println(" "); Serial.println("Initialize Pins"); initialize_pins(); // start the SPI library: Serial.println("Start SPI"); SPI.begin(ADC_nCS_Pin); SPI.setClockDivider(ADC_nCS_Pin,SPI_CLOCK_DIV); SPI.setBitOrder(ADC_nCS_Pin,MSBFIRST); // Most Significant Bit first SPI.setDataMode(ADC_nCS_Pin,SPI_MODE1); // SPI_MODE1 - Clock Polarity (CPOL): 0 - Clock Phase (CPHA): 1 - Output Edge: Rising - Data Capture: Falling startADC(); writeSingleRegister(CONFIG3_reg_add,0b11000000); // use internal reference buffer, Vref=2.4V writeSingleRegister(CONFIG1_reg_add,0b10010100); // data rate = 24bit, 4kSPS (datasheet, p. 41) --> 1001 0100 writeSingleRegister(CONFIG2_reg_add,CONFIG2_default); writeSingleRegister(CH1SET_reg_add,CHnSET_default); writeSingleRegister(CH2SET_reg_add,CHnPWDN); writeSingleRegister(CH3SET_reg_add,CHnPWDN); writeSingleRegister(CH4SET_reg_add,CHnPWDN); writeSingleRegister(GPIO_reg_add,GPIO_output); // start test signal Serial.println("Start test signal"); analogWrite(DAC0,Test_voltage_LOW); analogWrite(DAC1,Test_voltage_HIGH); if (RDATA_MODE==false){ digitalWrite(ADC_nCS_Pin,LOW); //enable device SPI.transfer(ADC_nCS_Pin,RDATAC); digitalWrite(ADC_nCS_Pin,HIGH); //disable device } } void loop() { if (CAPTURE_DATA_MODE==false){ Serial.print("Register ID reg: ") ; Serial.println(readSingleRegister(ID_reg_add),HEX); //readAllRegisters(); } else{ time = micros(); if ((time % (t_measure_us)) >= t_StartADC_us) { //start read ADC Serial.println("Start conversion"); digitalWrite(ADC_Start_Pin,HIGH); //start conversion readADC(response_status, ADC_values_nCH); digitalWrite(ADC_nCS_Pin,HIGH); //enable device digitalWrite(ADC_Start_Pin,LOW); //stop conversion // print status word if (print_status_word){ Serial.print("Status register: "); for (int i=0; i<byte_status;i++){ Serial.print(response_status[i],HEX); Serial.print(" "); } ADC_status=0; ADC_status |= (response_status[0])<<16; ADC_status |= (response_status[1])<<8; ADC_status |= (response_status[2]); StatusWord=writeStatusWord(ADC_status); Serial.print(" StatusWord: "); Serial.print(" "); Serial.print(" - begin="); Serial.print(StatusWord.Begin1100,BIN); Serial.print(" - FAULT_STATP="); Serial.print(StatusWord.FAULT_STATP,BIN); Serial.print(" FAULT_STATN="); Serial.print(StatusWord.FAULT_STATN,BIN); Serial.print(" GPIO="); Serial.print(StatusWord.GPIO,BIN); Serial.println(); } if (print_data){ // print channel data for (int i=0; i<nCH;i++){ ADC_total=0; if (byte_data==2) { ADC_total |= (ADC_values_nCH[i][0])<<8; ADC_total |= (ADC_values_nCH[i][1]); // if( ((ADC_total & 0xffff) & (0x8000))) { // ADC_total = ADC_total|0xffff0000; // } } else if (byte_data==3) { ADC_total |= (ADC_values_nCH[i][0])<<16; ADC_total |= (ADC_values_nCH[i][1])<<8; ADC_total |= (ADC_values_nCH[i][2]); //if( ((ADC_total & 0xffffff) & (0x800000))) { //ADC_total = ADC_total|0xff000000; // } } Serial.print("CH "); Serial.print(i+1); Serial.print(" - BIN: "); PRINTBIN(ADC_values_nCH[i][0]); Serial.print(" "); PRINTBIN(ADC_values_nCH[i][1]); if (byte_data==3){ Serial.print(" "); PRINTBIN(ADC_values_nCH[i][2]); } Serial.print(" HEX: "); Serial.print(ADC_values_nCH[i][0],HEX); Serial.print(" "); Serial.print(ADC_values_nCH[i][1],HEX); if (byte_data==3){ Serial.print(" "); Serial.print(ADC_values_nCH[i][2],HEX); } Serial.print(", Voltage: "); Serial.print(calcVoltage_mV(ADC_total),1); Serial.println(); } } Serial.println(); //Test_voltage=random(0,255); //analogWrite(DAC0,Test_voltage); //Serial.print("Test Voltage: "); //Serial.println(calcTestVoltage_mV(Test_voltage),1); delayMicroseconds(20); } } } void initialize_pins(void){ // initialize the data ready and chip select pins: pinMode(ADC_nDRDY_Pin, INPUT); pinMode(ADC_nCS_Pin, OUTPUT); pinMode(ADC_Start_Pin, OUTPUT); pinMode(ADC_nPWDN_Pin, OUTPUT); pinMode(ADC_nSysReset_Pin, OUTPUT); digitalWrite(ADC_nSysReset_Pin,LOW); digitalWrite(ADC_nCS_Pin,HIGH); //disable device } void startADC(void){ digitalWrite(ADC_Start_Pin,HIGH); delayMicroseconds(10); digitalWrite(ADC_nPWDN_Pin,HIGH); //power down disabled delayMicroseconds(20); delayMicroseconds(1); digitalWrite(ADC_nSysReset_Pin,HIGH); //System reset disabled delay(150); //SPI.transfer(ADC_nCS_Pin,WAKEUP); //delay(1); SPI.transfer(ADC_nCS_Pin,SDATAC); delay(1); digitalWrite(ADC_nSysReset_Pin,LOW); //System reset disabled delayMicroseconds(1); digitalWrite(ADC_nSysReset_Pin,HIGH); //System reset disabled delayMicroseconds(10); digitalWrite(ADC_nCS_Pin,LOW); //enable device delayMicroseconds(10); digitalWrite(ADC_Start_Pin,LOW); //SPI.transfer(ADC_nCS_Pin,RESET); SPI.transfer(ADC_nCS_Pin,SDATAC); delayMicroseconds(5); SPI.transfer(ADC_nCS_Pin,STOP); delay(10); digitalWrite(ADC_nCS_Pin,HIGH); //disable device } void writeSingleRegister(uint8_t address, uint8_t data){ digitalWrite(ADC_nCS_Pin,LOW); //enable device SPI.transfer(ADC_nCS_Pin,WREG|address,SPI_CONTINUE); delayMicroseconds(t_delay_SPI_5_us); SPI.transfer(ADC_nCS_Pin,0x00,SPI_CONTINUE); delayMicroseconds(t_delay_SPI_2_us); SPI.transfer(ADC_nCS_Pin,data); delayMicroseconds(t_delay_SPI_2_us); digitalWrite(ADC_nCS_Pin,HIGH); //disable device } byte readSingleRegister(uint8_t address){ byte value; digitalWrite(ADC_nCS_Pin,LOW); //enable device SPI.transfer(ADC_nCS_Pin,RREG|address,SPI_CONTINUE); delayMicroseconds(t_delay_SPI_5_us); SPI.transfer(ADC_nCS_Pin,0x00,SPI_CONTINUE); delayMicroseconds(t_delay_SPI_2_us); value = (byte) SPI.transfer(ADC_nCS_Pin,0); delayMicroseconds(t_delay_SPI_2_us); digitalWrite(ADC_nCS_Pin,HIGH); //disable device return value; } void readAllRegisters(){ byte val[NUM_REGISTERS]; digitalWrite(ADC_nCS_Pin,LOW); //enable device SPI.transfer(ADC_nCS_Pin,RREG|0x00,SPI_CONTINUE); delayMicroseconds(t_delay_SPI_5_us); SPI.transfer(ADC_nCS_Pin,0x14,SPI_CONTINUE); delayMicroseconds(t_delay_SPI_2_us); for (int i=0;i<NUM_REGISTERS;i++){ val[i] = (byte) SPI.transfer(ADC_nCS_Pin,0,SPI_CONTINUE); delayMicroseconds(t_delay_SPI_2_us); } SPI.transfer(ADC_nCS_Pin,0); delayMicroseconds(t_delay_SPI_2_us); digitalWrite(ADC_nCS_Pin,HIGH); //disable device for (int i=0;i<NUM_REGISTERS;i++){ Serial.print("Register "); Serial.print(i); Serial.print(": "); Serial.println(val[i],HEX); } } void readADC(byte status_reg[], byte data[nCH][byte_data]){ while (digitalRead(ADC_nDRDY_Pin)) { } // wait until nDRDY is 0 to read data digitalWrite(ADC_nCS_Pin,LOW); //enable device delayMicroseconds(1); if (RDATA_MODE==true){ SPI.transfer(ADC_nCS_Pin,RDATA,SPI_CONTINUE); delayMicroseconds(t_delay_SPI_5_us); } //status word for (int i=0; i<byte_status;i++){ status_reg[i] = SPI.transfer(ADC_nCS_Pin,0,SPI_CONTINUE); delayMicroseconds(t_delay_SPI_2_us); } //data for (int i=0; i<nCH;i++){ for (int k=0;k<byte_data;k++){ data[i][k]= SPI.transfer(ADC_nCS_Pin,0); delayMicroseconds(t_delay_SPI_2_us); } } digitalWrite(ADC_nCS_Pin,HIGH); //disable device delayMicroseconds(1); } float calcVoltage_mV(uint32_t ADCvalue){ float voltage; if (byte_data==2) { voltage = (float) ADCvalue*Uref_mV/max_15bit; } else if (byte_data == 3){ voltage = (float) ADCvalue*Uref_mV/max_23bit; } return voltage; } float calcTestVoltage_mV(uint32_t value){ float voltage = (float) value*Uref_mV/max_8bit; return voltage; } StatusWord_t writeStatusWord(uint32_t ADC_status){ StatusWord_t value; for (int i=0;i<4;i++){ bitWrite(value.Begin1100,3-i,bitRead(ADC_status,23-i)); // first bits must be 1100 } for (int i=0;i<8;i++){ bitWrite(value.FAULT_STATP,7-i,bitRead(ADC_status,19-i)); } for (int i=0;i<8;i++){ bitWrite(value.FAULT_STATN,7-i,bitRead(ADC_status,11-i)); } for (int i=0;i<4;i++){ bitWrite(value.GPIO,3-i,bitRead(ADC_status,3-i)); } return value; }





){kind=link}